

1. 서 론
2. 와이어 기반 로봇 위치 제어 시스템 개발
2.1 시스템 개요
2.2 와이어 윈치 개발
2.3 횡방향 트러스 개발
3. 구성 시스템 별 성능 검증
3.1 와이어 윈치 제어 성능 검증
3.2 횡방향 트러스 성능 검증
4. 결 론
1. 서 론
다양한 첨단 기술의 발전은 우리 일상생활의 편리함을 가져올 뿐만 아니라 노후 인프라 시설 점검 분야 또한 진화시키고 있다. 특히, 드론(Drone) 및 영상 기술의 비약적인 발전은 주로 인력 및 점검 차량에 의해 이루어지던 기존 교량 점검 방법을 보다 안전하고, 체계적인 방법으로 변화하게 만드는데 크게 기여하고 있다. 실제로, 카메라가 설치된 상용 드론을 그대로 교량 점검에 적용하는 방법(Seo et al. 2018), 드론에 360도 카메라를 설치하여 교량 균열 등을 탐지하는 기술(Humpe 2020)이 개발된 바 있으며, 더 정밀한 교량 점검을 위해 라이다(Light Detection and Ranging, LiDAR) 센서를 드론에 설치(Bolourian and Hammad 2020)하는 등 드론 기술을 교량 점검에 활용하기 위한 다양한 연구가 시도되고 있다. 이와 같은 기반 기술들의 발전을 바탕으로, 드론을 활용한 케이블 교량 점검 사각 지역 해소 기술이 개발(Lee et al. 2022)되었으며, AI 기술과 융합하여 교각에 대한 균열을 평가하는 기술이 개발되었다(An et al. 2021). 또한, 일반적인 드론으로는 접근이 어려운 철도 교량을 포함하는 철도시설물 점검을 위한 드론 개발(Kim et al. 2022)과 같은 연구가 수행되었으며, 드론을 이용한 체계적인 교량 안전점검을 위한 표준절차가 정립되었다(Lee et al. 2022). 즉, 드론을 활용한 노후 인프라 시설 점검이 보다 객관적이고 안전하게 수행될 수 있도록 개선되고 있다.
이와 같은 다양한 연구에도 불구하고, 드론을 활용한 교량 점검에는 아직 점검 공백 영역이 존재한다. 일례로, 최근에도 종종 발생하는 드론 추락(드론쇼 중 드론 추락(’23.8.12.), 한강 교량 상 드론 추락(’24.6.15.) 및 을지훈련 중 군 드론 추락(’24.8.20.) 등)으로 인한 인명 피해 위험으로 인하여, 교량 하부로 많은 차량 또는 사람이 지나가는 경우 드론 적용이 제한적이다. 또한, 난기류와 같은 환경에서도 안정적인 비행을 위해 다소 커진 드론 기체(Dorafshan et al. 2019)로 인하여 거더(Girder) 사이 협소한 공간과 같은 곳에는 드론을 이용한 영상 취득이 제한적이다. 특히, 교량 하부로 차량이 지나가는 오버패스(Overpass) 교량 하부 점검에는 드론 기술을 적용하기에 다소 제약이 있다.
따라서, 이러한 점검 공백을 해소하고자, 기반시설 첨단관리(Total care) 기술개발사업을 통해 오버패스 교량 하부의 영상 자동 수집이 가능한 와이어 기반 교량 하면 점검 시스템을 개발하고 있으며, 본 연구에서는 해당 시스템의 구성 기술 중 하나인 와이어 기반 로봇 위치 제어시스템 개발을 위한 기초 연구를 수행하고, 각 요소 기술별 시제품을 개발하여 그 성능 검증을 수행하였다.
2. 와이어 기반 로봇 위치 제어 시스템 개발
2.1 시스템 개요
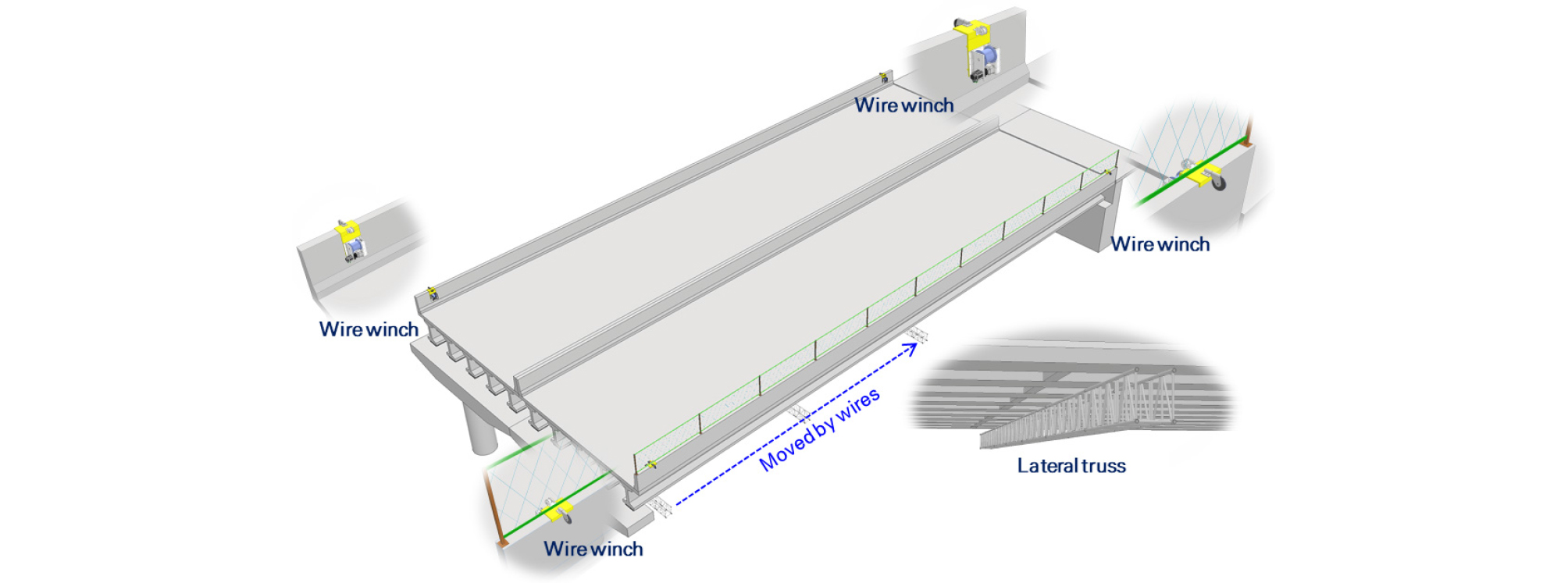
와이어 기반 교량 하면 점검 시스템은 ‘와이어 기반 로봇 위치 제어 시스템’과 ‘다관절 로봇 기반 영상 수집 시스템(이하 로보캠)’으로 구성된다. 와이어 기반 로봇 위치 제어 시스템은 로보캠이 교량 하면에서 고해상도 영상을 수집할 수 있도록 그 위치를 정밀하게 제어하는 시스템으로서 Fig. 1과 같이 와이어 윈치 4기와 로봇 이동용 횡방향 트러스 1기로 구성된다. 여기서, 와이어 윈치는 횡방향 트러스가 교량 하면에서 교량 길이 방향으로 이동할 수 있도록 개발되었으며, 이를 위해, 교량 모서리 4개 지점의 방호벽 위에 설치된다. 즉, 총 4개의 와이어 윈치 및 4줄의 와이어가 사용되며, 횡방향 트러스가 이에 연결되는 형식을 갖는다. 로보캠 시스템은 횡방향 트러스 상에서 설치된 레일을 이용하여 교량 폭 방향으로 이동하며, 다관절 로봇을 기반으로 교량 하면의 협소한 공간에 있는 목표물까지 접근하여 촬영할 수 있도록 구성된다. 단, 본 논문에서는 로보캠 관련 내용은 다루지 않도록 한다.
2.2 와이어 윈치 개발
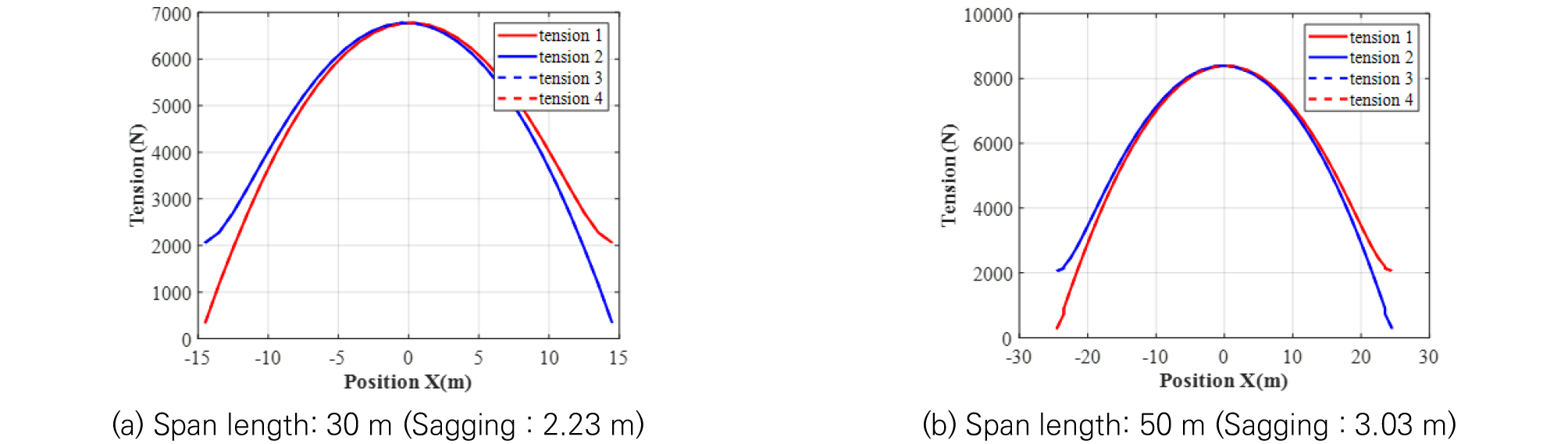
본 연구에서는 와이어 기반 로봇 위치 제어 시스템을 한 개 교량에 영구 설치하는 시스템이 아닌, 이동설치가 가능하도록 개발하였다. 이를 위해, 시스템을 소형화·모듈화하였으며, 각 시스템 개발 시 이를 고려하여 설계하였다. 시스템 설계를 위해, 먼저 와이어 윈치 4기에 작용하는 최대 장력을 각각 계산하였다. 이를 계산하기 위해 횡방향 트러스의 중량은 400 kg, 로보캠 중량은 20 kg으로 가정하였으며, 케이블의 무게는 고려하지 않았다. 경간장에 따른 최대 장력 변화를 확인하기 위하여 경간장이 30 m, 50 m 인 경우에 대해 각각 시뮬레이션을 수행하였다. 단, 이 경우에 경간별 수직 이격(Sagging) 높이를 다르게 적용하여 시뮬레이션을 수행하였다. 여기서, 수직 이격 높이는 거더 높이, 바닥판 높이 및 방호울타리 높이의 합으로 계산된다. 시뮬레이션 결과는 Fig. 2와 같으며, 여기서 tension 1~4는 각 윈치별 장력을 의미한다. 본 결과를 통해 경간 길이가 50 m인 경우에도 최대 장력이 10 kN 미만이었음을 확인하였고, 이를 근거로 와이어 윈치 모터 용량 설계 시 최대 장력을 10 kN 으로 선정하였다.
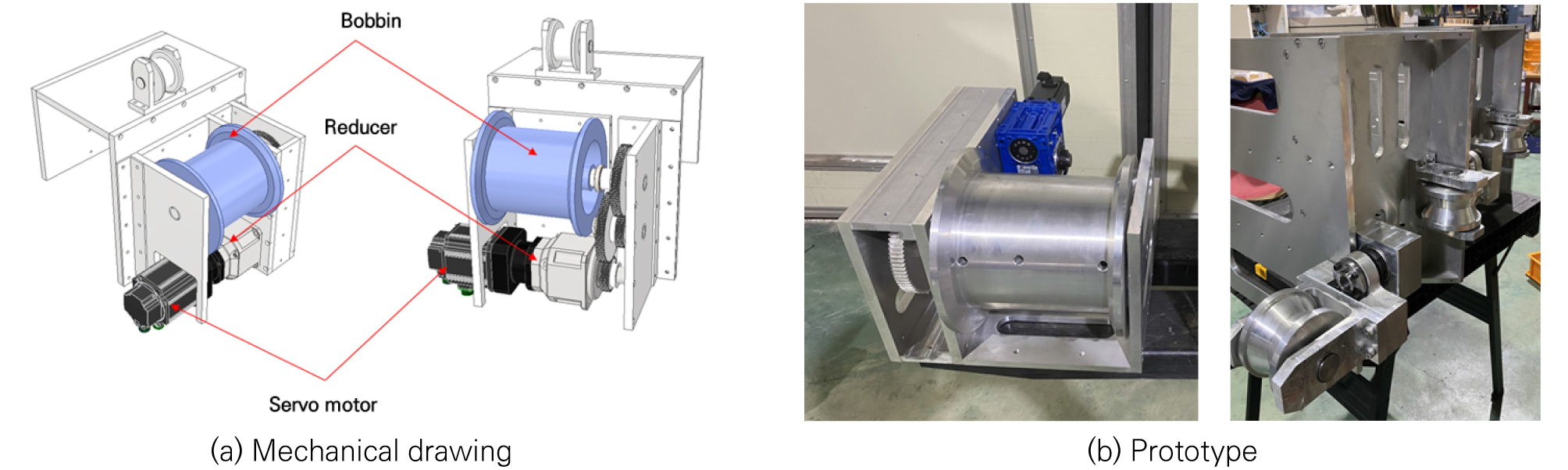
이와 더불어, 인력에 의한 이동·설치·해체가 가능한 수준의 최대 중량(약 20 kg 수준), 크기 및 현장 활용이 가능한 수준의 일반 휴대용 발전기 용량(1~3 kW 수준) 등을 고려하여 와이어 윈치 시스템을 설계하였다. 이를 반영하여 설계된 와이어 윈치의 형상 및 사양은 각각 Fig. 3(a), Table 1과 같다.
Table 1.
Specification of wire winch system
| Bobbin | Servo Motor | Gear Head | |
| Model | - | FE16D | NP142 |
| Feature | - Diameter : 200 mm |
- Rated torque : 7.63 N·m - Rated speed : 2000 rpm |
- 100:1 - Torque : 270 N·m |
본 논문을 통하여 설계된 와이어 윈치는 와이어 장력 10 kN이 작용하는 상태에서 최대 와이어 공급속도 3,140 mm/min 로 운용 가능하도록 설계되었으며, 50 m 길이(경간)의 교량에 적용할 경우, 교량 종방향 최소 이동시간은 약 16분이다. 따라서, 로보캠의 운용 속도를 함께 고려하면, 50 m 길이 교량을 약 2시간 내 점검 가능할 것으로 예상된다.
Fig. 3(a) 의 설계 결과를 토대로 제작된 와이어 윈치 시스템 시작품은 Fig. 3(b)와 같다. Fig. 3(b) 우측 사진은, 보빈으로부터 연결된 케이블이 횡방향 트러스에 안정적으로 연결될 수 있도록 본 연구를 통해 새로이 설계·제작된 도르래를 보인다.
2.3 횡방향 트러스 개발
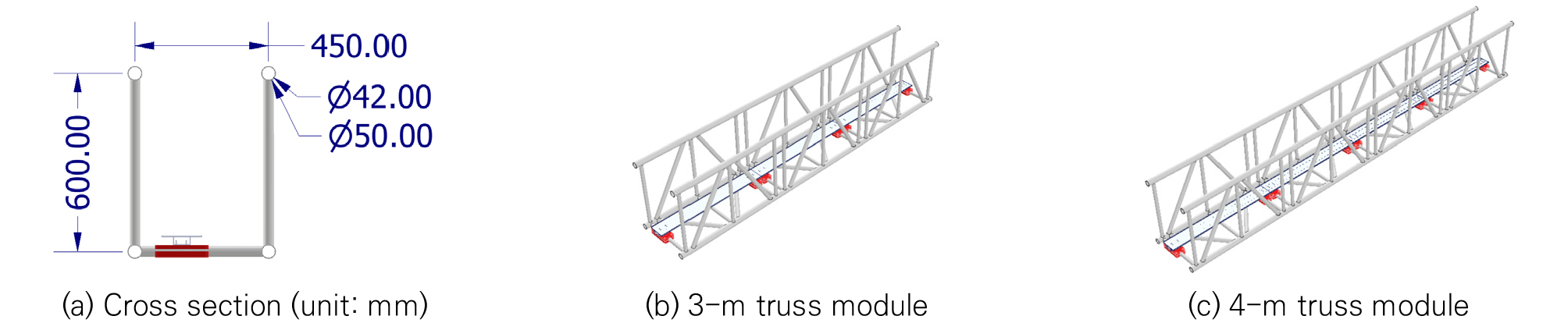
횡방향 트러스 설계에 사용된 재료는 알루미늄 합금이며, 로보캠 중량 20 kg, 최대 길이 20 m 및 자중을 고려하여 횡방향 트러스를 설계하였다. 단, 트러스 단면 설계를 위해서 트러스의 높이와 중앙부 처짐을 더한 값을 최소화하는 방향으로 최적화를 수행하였고, 이를 반영하여 도출된 최적화 결과(즉, 트러스 단면)는 Fig. 4(a)와 같다. 최적화 결과, 트러스 높이 600 mm, 폭 450 mm일 때 교량 하부 공간 높이를 가장 많이 확보할 수 있었으며, 로보캠의 자유로운 이동이 가능하도록 상단에는 브레이싱 등의 부재는 넣지 않았다. 여기서, Fig. 4(a) 좌하단 붉은색은 로보캠 이동을 위한 레일 및 그 연결부를 나타낸다.
횡방향 트러스의 경우에도 와이어 윈치 시스템과 동일하게, 작업자에 의해 이동·설치될 수 있도록 소형화·모듈화하여 설계·제작하였다. 이에 따라, 교량 폭 만큼의 길이를 갖는 단일 횡방향 트러스를 사용하지 않고, 현장 조립이 가능하도록 3 m, 4 m 길이의 트러스 모듈을 제작하고, 이를 교폭에 맞게 조합하여 사용하도록 설계하였다. 즉, 12 m의 폭을 갖는 교량의 경우, 4 m 트러스 모듈 3기를 현장 결합하여 사용하게 된다. 이와 같이 설계된 횡방향 트러스 모듈은 Fig. 4(b), (c) 와 같다.
횡방향 트러스를 모듈 단위로 개발함에 따라, 각 모듈을 연결해 줄 연결부(이음부)의 설계가 반드시 필요하다. 본 연결부는 양 모듈을 잘 연결해야 할 뿐만 아니라, 현장 조립·해체도 간단하게 설계되어야 한다. 이에 따라, Fig. 5와 같이 기존 트러스 연결에 널리 사용되는 ① 볼팅 방법 이외에도, ② 클램핑 방법 및 ③ 맞댐판 방법을 활용한 모듈 연결 방법을 도입하여, 시스템이 더 안정적으로 운용되도록 설계하였다. 단, 실제 현장에서 사용될 연결(결합) 방법은 시작품 제작 후 성능 검증 시험을 통해 결정하였다.
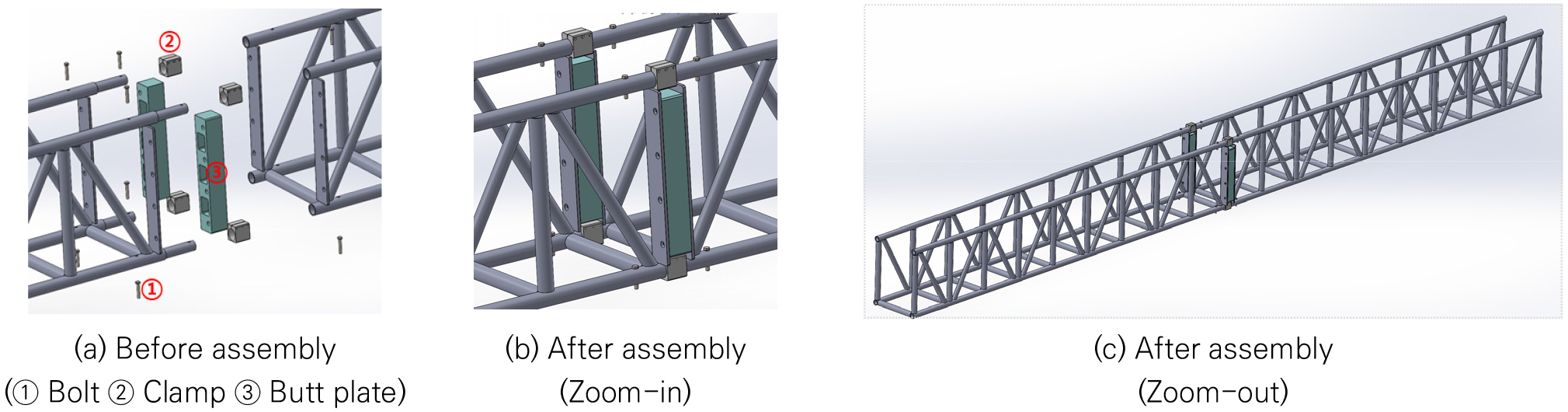
설계 결과를 토대로 제작된 횡방향 트러스 시작품은 Fig. 6(a) 우측 트러스와 같다. 동일 그림 상 좌측 트러스는 연결부가 없는 8 m 연속형 트러스로서 성능 검증 시험을 위한 비교군으로 제작되었다. 이와 관련된 자세한 사항은 3장에서 다루도록 한다. Fig. 6(b), (c)는 실제 제작된 연결부를 나타낸다.

3. 구성 시스템 별 성능 검증
3.1 와이어 윈치 제어 성능 검증
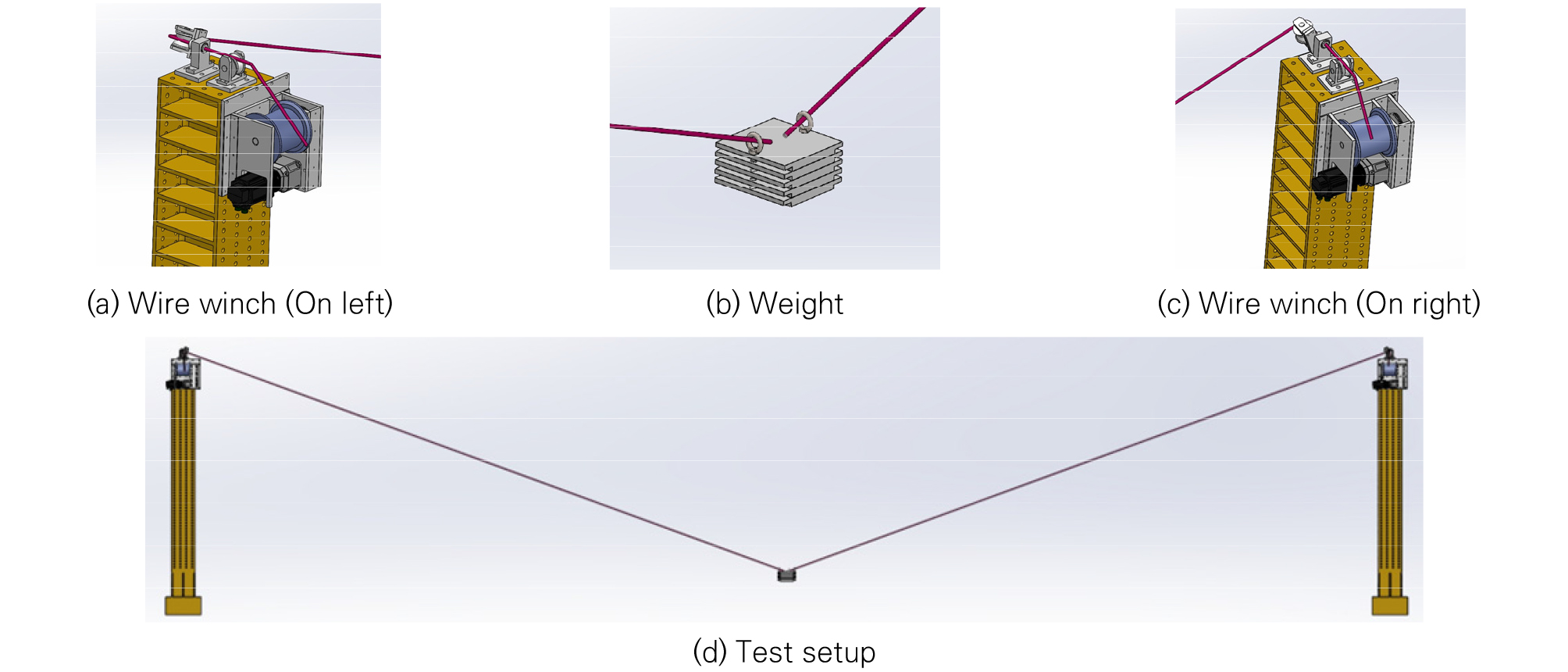
제 2장을 통해 제작된 와이어 윈치 및 횡방향 트러스 시작품에 대한 성능 검증 시험을 수행하였다. 먼저, 와이어 윈치 시스템의 경우, 여러 개의 윈치를 동시에 제어하여 목적물을 원하는 위치에 이동하는 것이 주된 성능 목표이다. 다만, 본 논문에서는 교량 폭 방향으로 나란히 설치된 와이어 윈치 각 2기의 경우 횡방향 트러스가 교량 길이 방향으로 전·후진 시 동일하게 작동한다고 가정하여, 윈치 2개만을 이용한 1차원 이동 제어 검증으로 시험 구성을 단순화하였다. 또한, 본 시험의 주목적은 반대 방향으로 권선되는 2개의 와이어 윈치에 대한 동시 제어 성능 검증인 바, 하중물의 무게를 최소화하여 시험하였다. 따라서, 와이어 윈치 최대 가반하중은 별도의 시험을 통해 검토되어야 한다. 즉, 본 제어 성능을 검증하기 위하여, 2기의 동일한 와이어 윈치 시작품을 제작하고, Figs. 7 to 8과 같이 20 m 간격으로 설치된 높이 5 m의 두개의 강구조물 상단에 와이어 윈치를 각각 설치하였다. 그 후, 두 윈치가 설치된 강구조물 중앙부에 약 20 kg의 하중물(추)을 위치시키고, 양쪽의 와이어 윈치로부터 연결된 두 개의 와이어를 하중물에 연결하였다. 하중물의 이동량을 정밀하게 측정하기 위해, 하중물이 지면으로부터 약 30 cm 높이에 위치하도록 유지하였으며, 바닥에 줄자를 설치하고, 하중물 측면에 레이저 포인터 1기 및 카메라 1기를 설치하여 위치 변화를 측정하였다. 이와 같이 설치된 와이어 윈치 2기에 하중물에 대한 직선 이동 명령을 주고, 이동 명령 값과 실측 이동 수치를 비교하여 위치 추정 정밀도를 계산하였다.

시험 결과, 이동 명령 값과 실측 이동 수치 간에 약 0.03~0.04 m/m의 오차가 발생하는 것을 확인하였다. 즉, 2~3 m 간격으로 시스템을 전진시킬 경우, 최대 0.12 m 의 오차가 발생함을 확인하였다. 이와 같은 오차는 보빈 직경과 와이어 직경이 각각 200 mm, 4 mm 임을 고려하면, 보빈에 적층되는 와이어에 의해 발생하는 오차로 추정된다.
3.2 횡방향 트러스 성능 검증
횡방향 트러스의 경우, 모듈 연결 방식에 대한 검토 시험이 필요하며, 트러스 최대 발생 처짐량에 대한 성능 검증 시험도 이루어져야 한다. 이를 위해, Figs. 5 to 6과 같이 4 m 길이의 횡방향 프레임 모듈 2기를 제작하고, 이를 연결할 수 있는 3가지 방법(볼트, 클램프, 맞댐판)에 대한 시작품을 함께 제작하였다. 다만, 볼트 및 클램프 체결 방식은 두 개의 강봉을 연결(볼트)하고, 벌어짐을 억제(클램프)하는 용도로 그 사용 목적이 서로 다른 바, 두 가지의 체결 방식은 함께 적용하는 것으로 하고, 맞댐판의 사용 여부에 대해서만 검토하였다. 이에 더하여, 시험 결과를 비교 검증할 수 있도록 8 m 길이의 연속형 트러스(시험 대조군)를 제작하여 그 결과를 비교하였다. 여기서, 대조군 시험체(Case #3)의 경우 Case #1, #2와는 다르게 불연속 구간 없이 일체형으로 제작된바, 볼트, 클램프 및 맞댐판를 이용한 연결부가 없다. 따라서, Case #3은 연결부가 갖는 불확실성이 매우 적은 이상적인 상태인 것으로 가정하여, 그 처짐량을 Case #1, #2와 비교하도록 한다. 모듈 간 연결방식 및 트러스 처짐량에 대해 검토하기 위한 시험 구성은 Table 2와 같다.
Table 2.
Test cases for the lateral truss
| Connection type | Note | |
| Case #1 | Bolt, clamp and butt plate | - |
| Case #2 | Bolt and clamp | - |
| Case #3 | No connection | Comparison group |
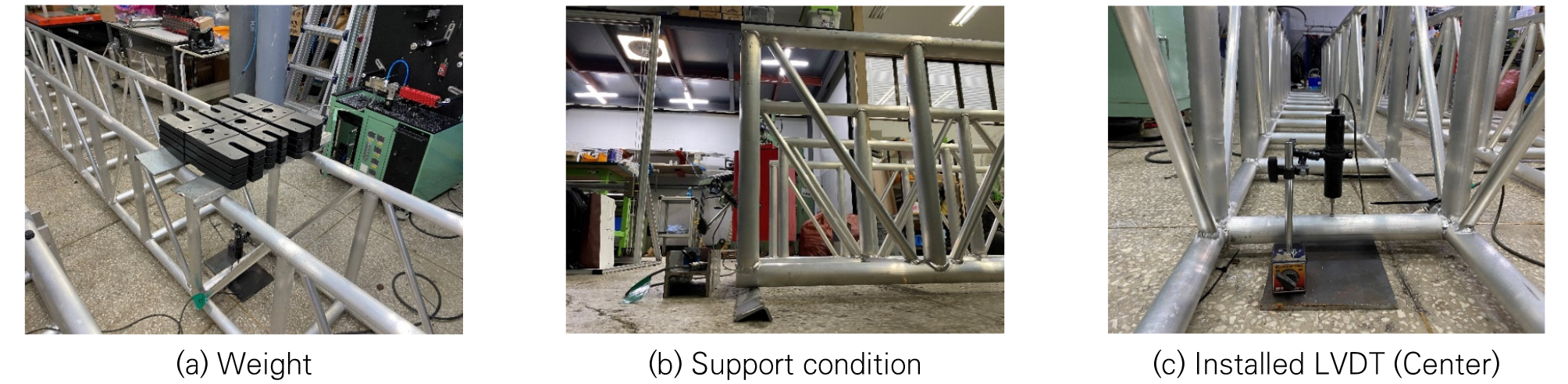
횡방향 트러스 모듈의 연결 방식 및 처짐량 검토를 위하여 Case #1~#3에 대해 3점 굽힘 시험을 수행하였다. Fig. 9(a)와 같이, 트러스 상단부 중앙에 연직방향 하중 최대 100 kg을 재하하였으며, 증분량은 20 kg이었다. 이 때, 단순보와 유사한 지점조건을 모사하기 위하여 양끝단으로부터 50 mm 되는 지점 하단을 Fig. 9(b)와 같이 L형 앵글로 지지하였으며, Fig. 9(c)와 같이 LVDT (Linear variable displacement transducer)를 활용하여 중앙부 및 양 지점부의 연직방향 처짐을 계측하였다. 각 Case 마다 세 차례 반복 시험(Test #1~#3)을 수행하였으며, Test #1이 가장 먼저 실시된 시험을 의미하고, Test #3은 가장 마지막에 수행된 시험을 의미한다. 단, Test #1로부터 Test #3을 수행하는 동안 연결부에 대한 재체결은 실시하지 않았으며, 자중에 의한 미소 처짐은 별도로 고려하지 않았다.
시험 결과, Fig. 10(a) - Case #1과 같이 볼트, 클램프 및 맞댐판을 모두 체결한 경우, 100 kg 하중 재하시 3회의 반복적인 시험에서 평균 1.37 mm의 일관적인 처짐이 발생하였다. 하지만, Fig. 10(b) - Case #2와 같이 맞댐판을 제거하고 하중을 재하한 경우, 첫 번째 시험(Test #1)에서 최대 9.20 mm의 처짐이 발생함을 확인하였고, 이는 Case #1 평균 변위의 약 6.72배에 해당하는 큰 처짐임을 확인하였다. 그 후, 순차적으로 수행된 Test #2, #3에서는 평균 1.76 mm의 상대적으로 적은 처짐이 발생함을 확인하였고, 이는 큰 처짐 발생 후 시스템이 안정화됨에 기인한 것으로 판단된다. 이에 반하여, 연결부가 없는 Fig. 10(c) - Case #3의 경우, 100 kg의 하중 재하시 평균 1.23 mm의 중앙부 연직 방향 처짐이 매우 일관적으로 발생하는 것을 확인하였다.
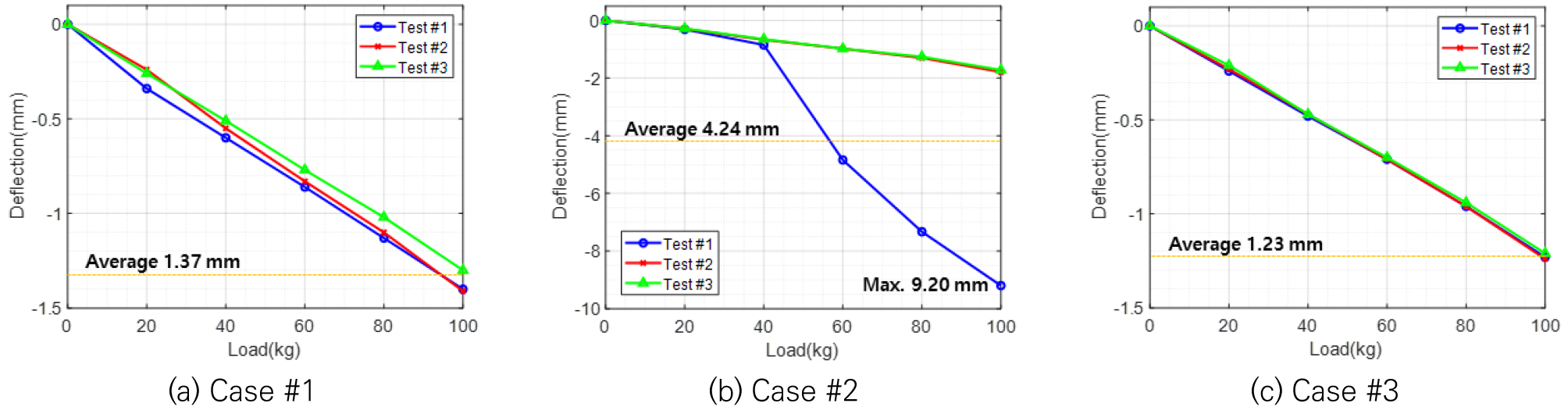
이와 같은 실험 결과를 통하여, 횡방향 트러스를 포함한 전체 시스템의 안정적인 작동을 위해 볼트, 클램프 및 맞댐판을 모두 활용하여 트러스 모듈을 연결하는 것이 합당하고 판단하였다. 또한, Case #1에서 발생한 처짐량을 기반으로 실규모 교량에서의 처짐을 역추산하면 교량 폭 20 m, 로보캠 무게 최대 50 kg 일 때, 중앙부 예상 처짐은 약 10.70 mm 로 매우 적은 처짐이 발생할 것으로 예상되며, 이를 근거로 본 기술을 이용한 교량 점검시 교량 하부로 이동하는 차량에 매우 적은 영향을 줄 것으로 예상된다.
4. 결 론
본 논문에서는 최근 다양하게 연구되고 있는 ‘드론 기반 교량 점검 방법’의 점검 공백 영역 중 하나인 오버패스 교량 하부를 대상으로 한 새로운 점검 기술을 제안하고, 주요 요소 기술에 대한 시제품 제작 및 성능 검증 등 관련 기초 연구를 수행하였다. 본 논문을 통해 개발된 교량 하면 점검용 와이어 기반 로봇 위치 제어 시스템은 기반시설 첨단관리(Total care) 기술개발사업을 통해 개발되고 있는 ‘와이어 기반 교량 하면 점검 시스템’의 핵심기술 중 하나로서, 로보캠(다관절 로봇 기반 영상 수집 시스템)이 교량 하면에서 고해상도 영상을 수집할 수 있도록 그 위치를 정밀하게 제어하는 기술이다.
제안 시스템은 와이어 윈치 및 횡방향 트러스로 구성되며, 시스템 운용중 발생할 수 있는 최대하중을 설계에 고려함과 동시에 이동식 설치가 가능하도록 소형화·모듈화하여 설계·제작하였다. 와이어 윈치에 대한 성능 검증 시험을 통해 목적물에 대한 교량 길이 방향(횡방향) 제어 오차가 약 0.03~0.04 m/m 발생하는 것을 확인하였고, 이 오차는 보빈에 적층되는 와이어에 기인함을 확인하였다. 또한, 횡방향 트러스 성능 검증 시험을 통해 볼트, 클램프 및 맞댐판을 모두 이용하여 트러스 모듈을 연결하는 것이 예측 불가능한 거동을 최대한 줄일 수 있음을 확인하였고, 교량 폭 20 m의 교량에 적용할 경우 약 10.70 mm 의 매우 작은 처짐이 발생할 수 있음을 실험적으로 검증하였다.
이와 같은 결과를 통해, 추후 기술 개발 완료 시점에는 본 기술을 이용한 오버패스 교량 하부 정밀 점검을 수행할 수 있을 것으로 기대되며, 기존 인력에 의해 이루어지던 점검을 본 기술로 대체함을 통해 작업자 사고도 감소시킬 수 있을 것으로 기대된다. 다만, 본 기술을 실제 교량 점검에 활용하기 위해서는 시스템 현장 설치 방안을 포함하는 현장 적용 시나리오(매뉴얼) 작성이 필요하고, 실제 횡방향 트러스의 무게 및 와이어 윈치와의 연결방법이 고려된 시스템에 대한 추가적인 검증이 필요하며, 무엇보다도 로보캠 시스템과의 통합 연계 검증이 필요하다.
