

1. 서 론
2. 와이어 기반 로봇 위치 제어 시스템 개선
2.1 제안 시스템 개요
2.2 횡방향 트러스 개선
2.3 와이어 윈치 개선
2.4 신규 부부재 개발
3. 시스템 현장 적용성 검토
3.1 현장 적용성 검토 실험 개요
3.2 시스템 설치 및 요구 기능 구현성 검토
3.3 현장 적용성 검토
4. 결 론
1. 서 론
우리나라 산업화 시기에 건설된 다수의 교량들이 현재 급속하게 노후화되고 있으며, 공용연수가 30년 이상된 노후 교량은 현재(2024년 기준) 국내 전체 교량의 약 21 %에 달한다(Park 2025). 또한, 이는 점차 증가하여, 2030년에는 전체 교량의 약 51 %에 달할 것으로 전망된다(Lee 2023). 이와 더불어, 정부에서도 노후 교량에 대한 안전사고 우려가 커짐에 따라 시설물 정밀안전진단 대상을 확대하였다. 즉, 점검 대상 교량 개소 수가 지속 증가함에 따라, 인력에 의한 현장점검을 최소화하고, 양질의 정보를 자동으로 수집하고, 분석 및 판단할 수 있는 기술의 개발이 필요한 실정이다.
이를 위해 최근 다양한 첨단 기술이 교량 유지관리 분야에 도입되고 있으며, 드론(Drone) 및 인공지능 기술의 발전은 교량 외관 조사 분야를 크게 변화시키고 있다. 특히, 드론 기술들이 실제 점검 현장에 적용되고 있을 뿐만 아니라, 관련 기관에서는 드론 전문직을 채용하는 등 드론 기반 교량 유지관리 기술이 현업에 적용될 수 있도록 적극적인 움직임이 이루어지고 있다(Kim et al. 2025). 그럼에도 불구하고, 여전히 점검 공백 영역은 존재한다. 특히, 과선교(Overpass, 오버패스 교량) 하부의 경우, 드론에 의한 점검뿐만 아니라, 인력에 의한 육안 점검에도 일부 제약이 있다. 이를 해소하기 위하여, 와이어 및 로봇 기술을 이용한 교량 하면 영상 수집 기술이 기반시설 첨단관리(Total care) 기술개발사업을 통하여 최초 제안된 바 있다. 본 기술은 복수의 와이어를 이용하여 횡방향 트러스를 교량 하면에 접근시키고, 교축 방향으로 이동시키며, 횡방향 트러스 상부에 설치된 영상 수집 로봇(매니퓰레이터)을 통해 양질의 교량 하면 영상을 자동으로 수집하는 방법이다. 선행 연구(교량 하면 점검용 와이어 기반 로봇 위치 제어 시스템 구성을 위한 기초 연구)를 통해 전반적인 시스템 설계 및 각 기구부의 단위 성능까지는 검토가 되었으나, 실제 교량 점검에 투입되기 위해서는 전체 시스템 통합을 위한 부부재 설계·제작 및 실제 교량 적용을 통한 시스템 개선 등이 이루어져야 한다(Kim et al. 2024).
이에 본 연구에서는 교량 하면 점검용 와이어 기반 로봇 위치 제어 시스템을 실제 교량에 적용하기 위한 현재 시스템 개선점을 분석하고, 이를 기반으로 신규 부재 제안 및 기존 부재에 대한 개선을 제안하였으며, 이를 제작 및 실제 교량에 적용하여 시스템 통합 테스트를 수행하였다. 또한, 본 시스템의 위치 제어 정밀도를 측정하여 본 시스템의 현장 적용성을 판단하고자 한다.
2. 와이어 기반 로봇 위치 제어 시스템 개선
2.1 제안 시스템 개요
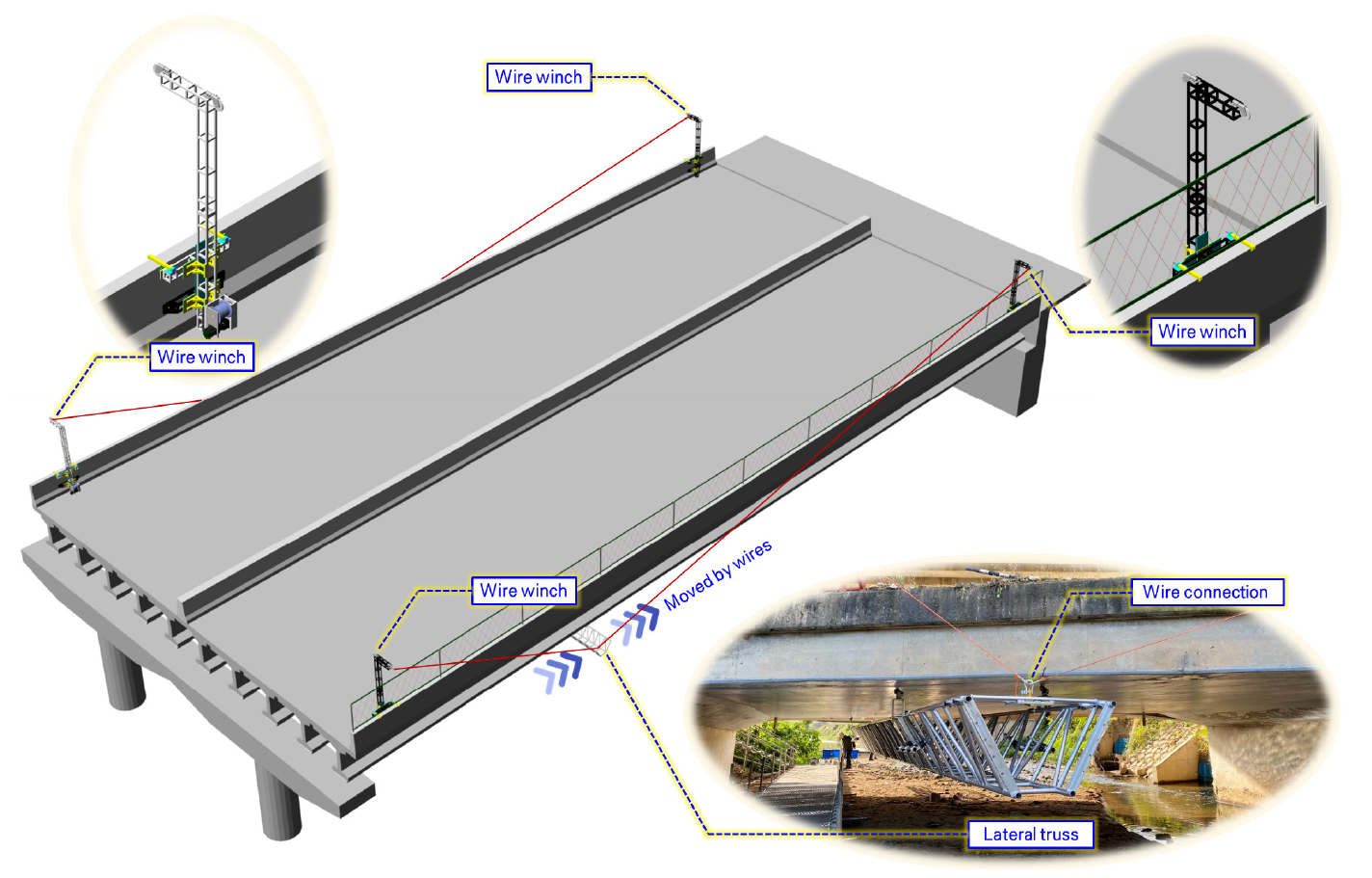
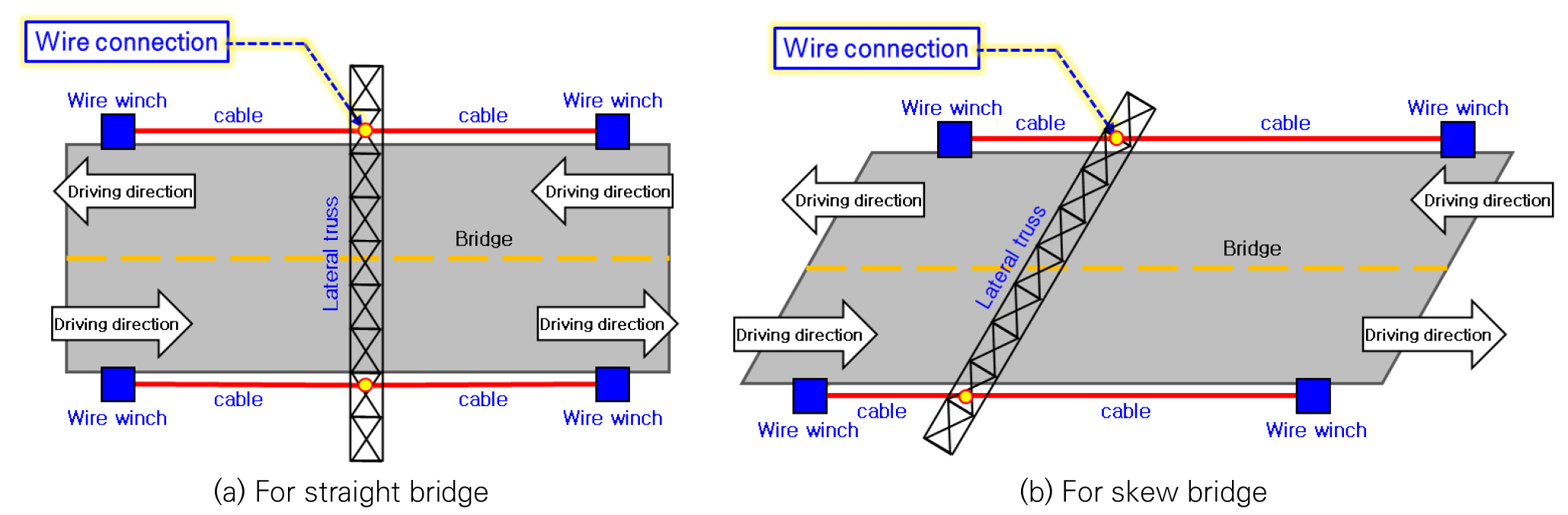
와이어 기반 로봇 위치 제어 시스템은 교량 하면 영상 촬영용 로봇(이하 로보캠)이 정확한 위치에서 교량 하면 영상을 수집할 수 있도록 하는 시스템으로서, 와이어를 이용하여 횡방향 트러스를 교량 하면에 위치시키고, 이를 교축 방향으로 정밀하게 이동 제어 하는 시스템을 통칭한다. Fig. 1은 개략적인 시스템 구성을 보이며, 크게 와이어 윈치(wire winch) 4기와 횡방향 트러스(lateral truss) 1기로 구성된다. 선행 연구를 통하여, 윈치 2기를 이용한 목적물 위치 제어 정밀도 검토 및 횡방향 트러스의 연결부 안전성 검토가 이루어졌으나, 이 기술을 실제 교량 하면 점검에 적용하기 위해서는 일부 시스템의 보완이 필요하다.
이에, 본 연구에서는 교량 하면 점검용 와이어 기반 로봇 위치 제어 시스템을 실제 교량 하면 점검에 적용할 수 있도록, 시스템 통합과 기능 개선을 위해 기존 부재에 대한 개선안과 새로운 기능이 부여된 부부재를 제안하였다. 이들 부재를 제작하고, 전체 시스템을 실제 교량에 적용하여 현장 적용성을 판단하였다.
2.2 횡방향 트러스 개선
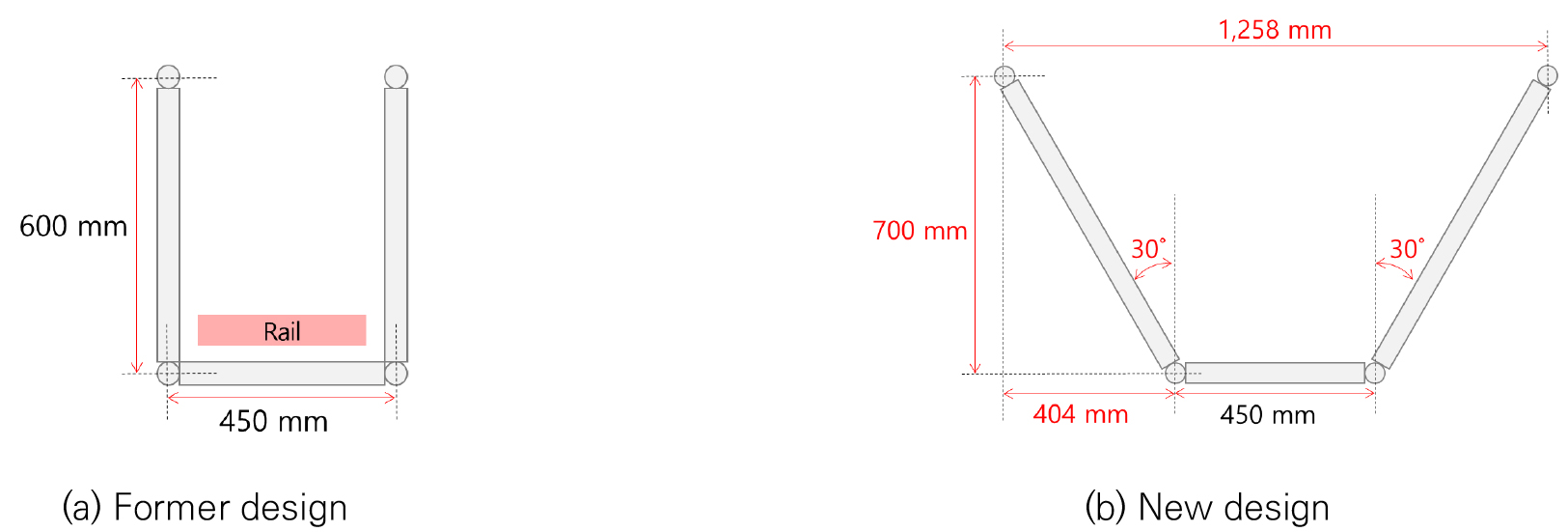
기존 횡방향 트러스는 Fig. 2(a)와 같이 폭 450 mm, 높이 600 mm의 상부 개방형 직사각형 단면을 갖는다. 횡방향 트러스 내부에는 로보캠이 이동할 수 있는 레일이 설치되며, 해당 레일을 통해 로보캠이 교축 직각 방향으로 이동하며 교량 하면의 영상을 촬영하게 된다. 특히, 로보캠은 매니퓰레이터 끝단에 카메라가 설치된 형태로서, 육안 점검 및 드론 점검의 사각지대인 교량 하면 플랜지 상부 균열 등을 확인할 수 있도록 설계되었다. 하지만, 기존 횡방향 트러스의 경우, 직사각형 단면으로 제작되어 횡방향 트러스 내부에서 매니퓰레이터의 움직임에 제한이 있었다.
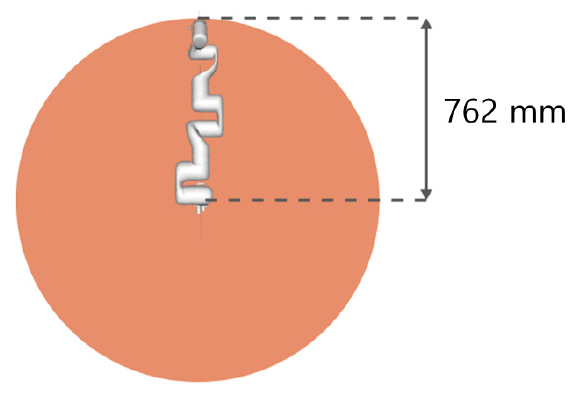
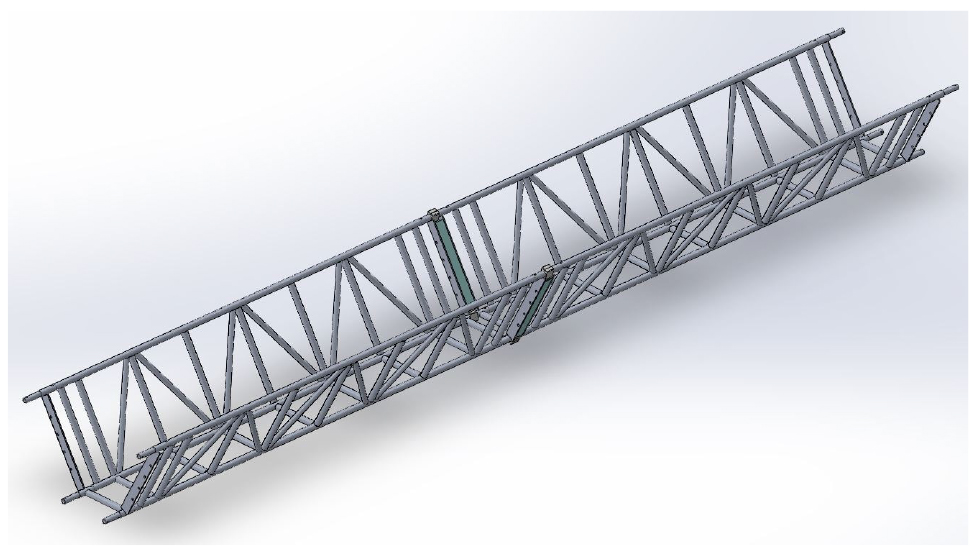
이에, 본 연구에서는 Fig. 3의 매니퓰레이터 작동반경을 고려하여, 횡방향 트러스 단면을 재설계하였다. 여기서, 형상(직사각형)은 유지하고, 일부 치수만을 증가시킬 경우에는 전체 중량이 크게 증가하게 되므로, 매니퓰레이터 구동 반경과 관련이 큰 상부 폭만을 확장한 역사다리꼴 형태로 재설계하여 중량 증가를 최소화하였다. 개선된 시스템 단면은 Fig. 2(b)와 같으며, 이와 같은 시스템 개선을 통해, 매니퓰레이터의 작동 반경을 추가 확보하였을 뿐만 아니라, 횡방향 트러스 다중 적재를 가능케 하여 시스템 현장 이동 및 보관을 용이하게 하였다. 단, 트러스 연결부는 기존과 동일하게 볼팅(Bolting), 클램핑(Clamping) 및 맞댐판 방법을 이용하여 체결하도록 설계하였으며, 횡방향 트러스 2기를 연결한 형상은 Fig. 4와 같다.
2.3 와이어 윈치 개선
와이어 윈치는 횡방향 트러스의 위치를 제어하기 위한 시스템으로서, 와이어를 통해 횡방향 트러스와 연결된 총 4기의 윈치를 동시 제어하여 횡방향 트러스의 위치(교축 방향 위치)를 조정하게 된다. 기존 와이어 윈치의 설계 시, 모터 용량 결정을 위해 설계 장력을 계산하였으며, 안전측 설계를 위하여 가장 불리한 값들을 활용하였으며, 그 값들은 Table 1과 같다. 이는 대상 교량 최대 길이, 트러스-윈치 간 최소 수직 높이, 횡방향 트러스 및 로보캠 최대 중량을 포함하며, 이를 통해 도출된 설계 장력 10 kN을 기반으로 시스템을 설계하였다.
Table 1.
Design parameters for wire winch
| Design parameter | Bridge length | Height | Lateral truss weight | Robo-cam weight |
| Value | 50 m | 2.2 m | 400 kg | 20 kg |
본 연구에서도 동일한 설계 장력을 대상으로 와이어 윈치를 재설계하였다. 다만, 안정적인 시스템 구동 및 현장 활용성 증대 측면에서의 설계 변경을 수행하였다. 즉, Fig. 5와 같이 와이어의 안정적인 권선을 위해서 케이블 직경 절반에 해당하는 나선홈(나사선)을 갖도록 설계하였으며, 예상치 못한 전기 차단에도 와이어의 급작스러운 풀림을 방지하기 위하여, 윈치 내 웜기어를 갖도록 설계하였다.

2.4 신규 부부재 개발
선행 연구에서는 와이어 기반 로봇 위치 제어 시스템의 주요 기구부(윈치 및 횡방향 트러스)에 대한 설계·제작 및 실내 실험을 통한 단위 성능 검증이 이루어졌다. 주요 기구부를 하나의 시스템으로 운용하기 위해서는 통합을 위해 필요한 기존 시스템의 개선뿐만 아니라, 전체 시스템의 운용을 위해 주요 기구부들의 연결부에 요구되는 기능이 부여된 부부재의 추가가 필요하다(Kim et al. 2024). 이에, 본 연구에서는 시스템 통합 운영을 위해 필요한 부부재들을 새로이 설계하였다.
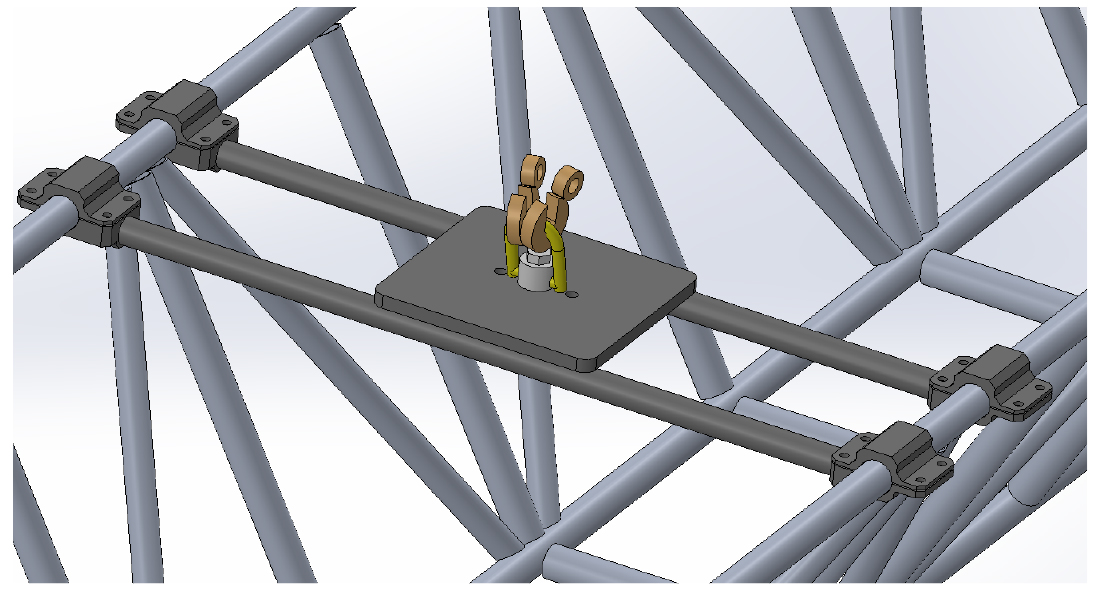
먼저, 와이어 윈치로부터 공급되는 와이어와 횡방향 트러스를 연결해주는 부부재를 설계하였다. 특히, Fig. 6과 같이 횡방향 트러스가 직선 교량 하면에 교축 직각 방향으로 위치(사교의 경우 교대와 평행하게 위치)하고, 교축 방향으로의 이동 제어가 용이하도록 횡방향 트러스 양 끝단에 와이어를 각각 2기씩 연결할 수 있도록 부부재를 설계하였다. 해당 부부재는 횡방향 트러스 및 로보캠의 무게를 충분히 지지할 수 있도록 설계되었으며, 현장 조립 및 해체가 용이하도록 클램프 형식으로 설계되었다. 이와 더불어, 일반적인 직선교 뿐만아니라 사교에도 본 시스템을 그대로 적용할 수 있도록, 두 개의 와이어가 직접 연결되는 부분은 회전에 자유로운 호이스트링(Hoist ring)을 사용하도록 설계하였다. Fig. 7은 이를 반영하여 설계된 와이어 연결용 부부재를 나타낸다.
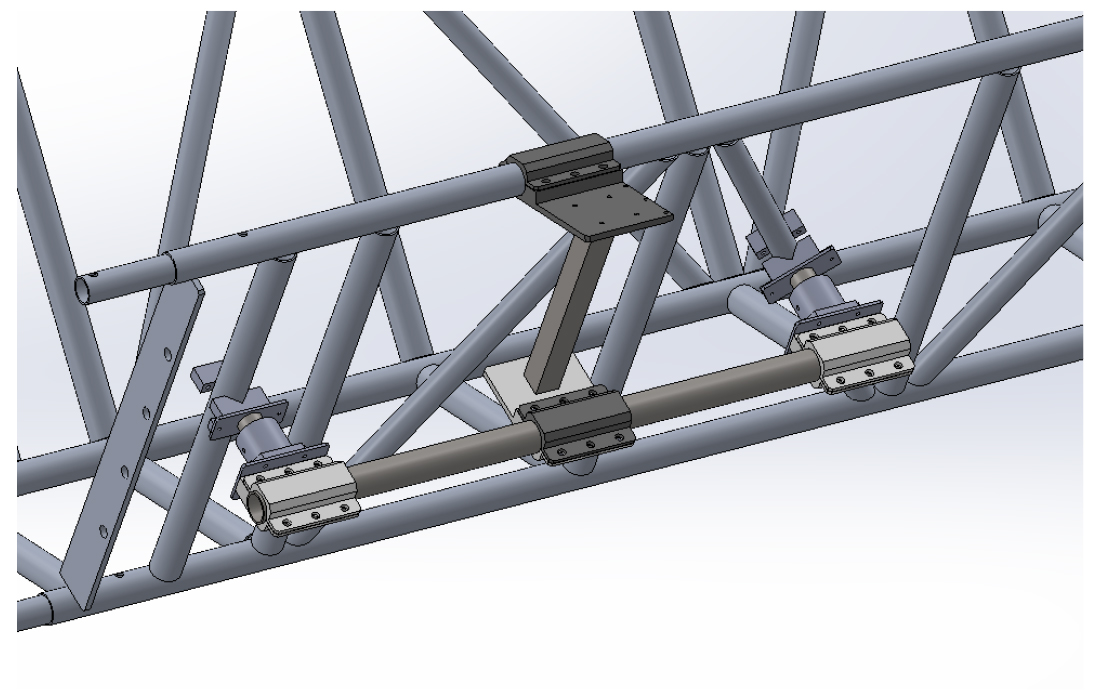
와이어 만을 이용하여 횡방향 트러스를 이동 제어할 경우, 운용 환경(속도 등)에 따라 횡방향 트러스에 일부 흔들림이 발생할 수 있다. 또한, 트러스의 흔들림을 장력만으로 제어하려면 다소 큰 장력의 도입이 필요할 수 있고, 이는 윈치에 설치될 모터 용량 설계에도 영향을 줄 수 있다. 이를 보완하고자, 횡방향 트러스의 교량 하면 접지를 위한 부부재를 설계하였다. 설계된 교량 하면 접지 부부재의 형상은 Fig. 8과 같으며, 본 부부재는 횡방향 트러스 양 끝단에 각 2기씩 설치된다. 이와 더불어, 기구부 상단에는 스프링 캐스터를 설치하여 횡방향 트러스가 교량 하면에 밀착하여 큰 진동 없이 교축 방향으로 이동할 수 있도록 설계하였다.
3. 시스템 현장 적용성 검토
3.1 현장 적용성 검토 실험 개요
본 연구에서는 선행 연구에서 수행된 부재별 단위 성능 검증에서 더 나아가, 전체 시스템에 대한 통합 성능 검증을 수행하였다. 이를 위하여, 제2장을 통하여 개선된 횡방향 트러스와 와이어 윈치 및 신규 설계된 부부재들을 제작하고, 이를 실제 교량에 설치 및 구동하였으며, 위치 제어 정밀도 측정 시험을 통해 현장 적용 가능성을 검토하였다. 특히, 신규 개발된 부부재의 활용성을 검토하기 위하여, 일반 직선 교량이 아닌 사교를 실험 대상 교량으로 선정하였다.
현장 적용실험 대상 교량인 A교량(경기도 소재)은 Fig. 9와 같이 길이 15 m, 폭 11 m의 라멘교이며, 60°의 각도를 갖는 사교이다. 현재는 상부 신설 교량으로 인해 일반 차량 통행이 없는 교량으로 일측 가드레일은 소실된 상태이다. 즉, 와이어 윈치 설치 대상물인 방호벽 또는 가드레일이 부재하여 본 실험만을 위한 윈치 거치용 가시설물을 제작하고, 이를 이용하여 현장 적용성 검토를 수행하였다. 따라서, 윈치 거치부에 대한 현장 적용성 관련 내용은 본 논문에서는 다루지 않고, 추후 별도 검증하도록 한다.
시스템 현장 적용성 검토 실험에서는 전체 시스템의 조립성을 검토하고, 각 기구부에 대한 요구 기능 구현성을 육안 검토하였으며, 마지막으로 위치 제어 정밀도를 측정하여 개발 시스템의 현장 적용성을 평가하였다.

3.2 시스템 설치 및 요구 기능 구현성 검토
본 시스템을 이용하여 교량 하면 전면을 점검하기 위해서는 연속화된 횡방향 트러스의 길이가 실험 대상 교량의 폭(사선 폭 약 13 m)보다 충분히 길어야 한다. 이에, 개선된 횡방향 트러스를 모듈 단위(4 m)로 4기를 제작하고, 맞댐판, 내부 파이프 및 볼팅을 통해 Fig. 10(a)와 같이 연속화하였다. 횡방향 트러스를 연속화한 이후에는 요구 기능 구현성 검토를 위하여 횡방향 트러스 내부에 로보캠을 임시 설치하여 작동 가능 범위를 육안 확인하였다. 단, 실험 대상 교량의 형식(라멘교) 특성상 매니퓰레이터 작동은 생략하였다.

다음으로 와이어 윈치와 관련하여, 나선홈이 파여있는 보빈을 포함한 와이어 윈치를 4기 제작하고, 4기의 서포트에 각각 설치하였다. 다만, 3.1절에서 언급한 바와같이 와이어 윈치 설치를 위한 기존 교량 시설물(방호벽 또는 가드레일)의 소실로 인하여, Fig. 11(b)와 같이 가시설물을 제작·설치하고 와이어 윈치를 조립하였다. 와이어 윈치의 요구 기능은 횡방향 트러스의 위치 제어정밀도이므로 해당 실험 결과는 후술하도록 한다.

본 연구를 통해 설계된 와이어 연결용 부부재는 Fig. 12와 같다. 총 2세트를 제작하여, 횡방향 트러스 양 끝단에 설치하였고, 와이어 윈치로부터 공급된 와이어를 각 2개씩 연결하였다. 시스템 운용 시에도 강봉 및 연결부에 육안 확인 가능한 변형은 발생하지 않았으며, 복수의 와이어가 직접 연결된 호이스트링도 시스템 설치 및 운용시 부드럽게 회전하며 움직임을 확인하였다.

교량 하면 접지용 부부재도 2세트를 제작하였으며, Fig. 13과 같이 횡방향 트러스 양 끝단 내측 약 1.5~2 m 지점에 설치하였다. 한 세트에 2개의 스프링 캐스터가 포함되며, 두 개의 스프링 캐스터를 연결한 가상의 선이 교축(트러스 이동 방향)과 평행하도록 설치하였다. 시스템 운용 시에도 스프링 캐스터를 제외한 교량 하면 접지용 부부재의 변형은 확인되지 않았다.

실제 교량에 설치된 와이어 기반 로봇 위치 제어 시스템은 Fig. 14와 같다. 교량 시점부와 종점부에 와이어 윈치를 설치하고, 와이어 윈치로부터 공급된 와이어를 와이어 연결용 부부재와 연결하였다. 그 후, 총 4기의 와이어 윈치를 동시 제어하여 횡방향 트러스를 교량 하면에 밀착하였다.

3.3 현장 적용성 검토
해당 와이어 기반 로봇 위치 제어 시스템은 횡방향 트러스를 교량 하면에서 정확한 위치(축방향)로 이동시키는데 주목적이 있다. 따라서, 위치 제어 정밀도 시험 수행을 통해 본 시스템의 현장 적용성을 검토하였다. 위치 제어 정밀도 시험은 와이어 윈치 제어 소프트웨어의 입력값(이동 거리 정보)과 실제 횡방향 트러스 이동 거리(측정값)를 비교하는 방식으로 수행하였다. 여기서, 실제 횡방향 트러스 이동 거리 측정을 위해서 눈금자(줄자)와 라인 레이저를 이용하였다. 먼저, 교량 하면 양측에 눈금자를 교축방향으로 부착하여 설치하고, 횡방향 트러스 양끝단에 라인 레이저를 설치하여 이를 교량 하면으로 조사하였다. 이때, 레이저가 조사된 위치의 눈금 값을 읽고, 초기값(시작점)을 감산한 상대값을 측정값으로 정의하였다. 각 2기의 와이어 윈치가 짝을 이루어 작동하므로, 횡방향 트러스 양단의 제어 정밀도를 각각 측정하였다.
횡방향 트러스 폭이 1,258 mm이고, 교량 점검시 영상을 일부 중첩하여 촬영한다고 가정하여, 정밀도 측정을 위한 횡방향 트러스 이동 최소 단위를 1,000 mm로 선정하였다. 또한, 시작 위치가 모든 실험에서 동일(예: 원점)할 경우, 보빈에 권선되는 위치로부터 발생하는 오차를 고려할 수 없게 되므로, 시작 위치(초기값)가 일정하지 않도록 횡방향 트러스를 지속 이동시키며 상대 이동 거리를 측정하였다. 최소 이동거리 1,000 mm부터 최대 5,000 mm까지 횡방향 트러스를 연속 이동시키며 상대 이동거리를 측정하였고, 각 이동거리별 측정값의 평균 오차는 Table 2와 같다. 여기서 교량 내측(Inside)은 교량 가드레일이 있는 측의 횡방향 트러스를 의미하며, 외측(Outside)은 교량 가드레일이 소실된 측을 의미한다.
실험 결과, 외측 횡방향 트러스의 제어 정밀도 실험에서의 측정값은 평균 오차 5.8 mm, 최대 오차 15 mm이었고, 이동 거리에 따른 누적 오차는 발생하지 않았다. 이와 같은 오차는 보빈에 권선되는 층수 또는 보빈 직경 등에 의한 단순 오차로 추정된다. 하지만 내측 횡방향 트러스의 제어 정밀도 실험에서의 측정값은 평균 오차 54.8 mm, 최대 오차 95 mm이었으며, 이동 거리가 증가할 경우 오차가 지속 증가하는 것을 확인하였다. 이를 근거로, 내측 횡방향 트러스 제어의 경우에는 이동 거리에 따른 누적 오차가 발생하는 것으로 판단된다. 오차가 증가하는 원인을 확인하기 위해 오차가 가장 크게 발생한 상태에서 시스템을 확인한 결과, 현장 적용성 검토 실험을 위해 임시로 설치한 가시설물 중 오차가 발생한 위치와 먼 쪽 가시설물의 앵커가 부실하게 고정되어 하중에 따라 들뜨는 현상이 있었던 것을 발견할 수 있었다. 즉, 해당 오차는 한쪽 앵커가 부실하게 설치되어 발생하였으며, 횡방향 트러스가 해당 윈치 설치 위치와 반대 방향으로 이동함에 따라 와이어 장력이 증가하였고, 해당 장력의 크기에 비례하여 발생한 추가 변위인 것으로 판단된다.
따라서, 외측 횡방향 트러스 위치 제어 측정 결과와 같이, 이동 거리가 증가하여도 일정한 작은 크기의 오차만 발생한다면, 본 기술을 교량 하면 점검에 바로 투입 가능할 것으로 예상된다. 다만, 내측 횡방향 트러스와 같이 측정 오차가 누적된다면, 추후 교량 하면 영상 정합 시 영상 왜곡이 발생할 수 있으므로, 향후 윈치가 부착되는 부재의 설치가 정교하게 이루어질 수 있도록 보완이 필요하다.
4. 결 론
본 연구에서는 교량 점검 공백 영역 중 하나인 과선교 하면 영상 수집을 위한 시스템 개발 관련 후속 연구를 수행하였다. 선행 연구를 통해 각 기구부에 대한 단위 성능 검증이 완료되었고, 본 연구를 통해서는 기존 시스템에 대한 보완 및 현장 적용에 필요한 상세 부재 개발이 이루어졌다. 특히, 시스템 현장 적용성을 검토하기 위하여, 전체 시스템을 제작·조립하고, 이를 실제 교량에 적용하여 위치 제어 정밀도를 측정하였다.
시스템 현장 적용을 통하여 개발된 각 기구부들이 요구 기능을 만족하고 있음을 육안 확인하였으며, 위치 제어 정밀도 실험을 통해 교량 상부에 설치된 와이어 윈치를 이용하여 교량 하면에 위치한 횡방향 트러스를 최대 약 6 mm 의 제어 정밀도를 갖고 운용할 수 있음을 확인하였다. 다만, 정교하지 않은 윈치 설치용 가시설물의 설치로 인해 누적 오차가 발생하는 현상도 함께 확인된 바, 윈치가 부착되는 부재의 설치가 정교하게 이루어질 수 있도록 시스템 상세 설계가 필요할 것으로 판단된다. 즉, 윈치가 설치될 구조물(윈치 설치용 구조물) 자체의 구조적 안전성 검토뿐만 아니라, 윈치 설치용 구조물이 고정될 대상 시설(가드레일, 방호벽 등)의 특성을 고려한 체결 방법 설계 및 구조 검토가 함께 이루어진다면, 다양한 형식의 방호울타리를 가진 교량에 본 시스템을 적용할 수 있을 것으로 기대된다.
