

1. 서 론
1.1 연구 배경
1.2 문제 정의
2. CDT 시스템 설계
2.1 시스템 구성 설계 및 역할 정의
2.2 상대좌표계 정의 및 수학적 모델
2.3 Auto Search 알고리즘
3. 고속도로 교량 바닥판 가설 사례 연구
3.1 테스트 현장 및 실험설계
3.2 실험 결과
3.3 기존 방법론과의 비교 분석
4. 결 론
1. 서 론
1.1 연구 배경
탈현장 건설(Off-Site Construction) 방법의 확산으로 건설 현장에서 크레인 작업의 중요성이 증대되고 있다. DfMA(Design for Manufacture and Assembly) 개념을 도입할 때 DfMA 측면에서 실제 현장 여건을 반영할 뿐 아니라 원가를 절감할 수 있는 인양 가설 방안을 사전에 도출하는 것이 필요하다. 프리팹 구조부재(prefabricated member)는 디지털 설계와 자동화 생산, 사전조립성 검토를 포함한 제품화된 공급체계를 갖춘 경우를 의미한다. 프리팹 부재의 설계를 위해서는 DfMA 개념의 적용이 반드시 필요하고 이를 통해 원가절감, 품질, 안전 확보를 할 수 있게 된다. 기존의 실무에서 수행하는 방법론으로는 다양한 주체가 참여하는 교량건설에서 이러한 개념을 적용하는데 한계가 있다. 그러나, 전면 BIM(Building Information Modeling) 도입이 확대되면서 참여하는 기업들의 기술 적용 여건이 개선되고 있고 인력부족에 대응하는 차원에서 탈현장 건설을 위한 자동화 생산 공장이 증가하고 있는 추세이다.
프리팹 교량 바닥판은 교량 부재중에서 가장 넓은 면적을 차지하기 때문에 공장에서 운반하면 바로 설치가 진행되어야 한다. 최근의 현장 여건이 교량 하부 공간의 변화가 잦고 사전에 운반 경로와 크레인 설치 위치에 대한 면밀한 검토가 없으면 가설 및 조립에 어려움을 겪을 수 있다. 전두께 바닥판은 폭이 넓고 얇은 구조부재이기 때문에 이를 설치할 때는 정밀한 크레인 위치 선정과 작업 계획이 요구된다. 프리팹 구조부재의 대형화와 중량화 추세로 인해 크레인 작업의 복잡도는 더욱 증가하고 있으며, 이에 따른 안전 리스크와 비용 상승이 주요 과제로 대두되고 있다.
현재의 일반적인 크레인 작업 계획방식은 건설현장의 여건을 반영하는데 몇 가지 한계를 갖는다. 첫째, 정확한 크레인의 설치위치 선정에 관한 사항이다. 크레인의 위치는 사전 시공계획에 의거해 확정되며 측량팀이 내려 준 도면좌표계 기반의 좌표에 따라 이루어지게 된다. 도면좌표계를 운용하는 데는 전문적인 측량팀의 참여가 필수적으로 요구되므로 시공계획팀과 전문 측량팀의 협업이 요구되고, 장비와 숙련 인력을 필요로 하여 시간과 비용이 과다 소요된다. UTM(universal transverse mercator) 좌표와 같은 복잡한 숫자 체계는 현장 작업자의 직관적 이해를 어렵게 하며, 좌표 변환 과정에서 발생하는 오류는 작업 지연의 주요 원인이 된다. 특히 중소규모 현장에서는 측량 전문 인력 확보가 어려워 정확한 좌표 관리가 쉽지 않은 실정이다. 둘째, 2D 도면 기반 계획의 한계이다. 전통적인 2D 도면과 크레인 차트에 의존하는 방법은 3차원 현장 조건과 동적 제약사항을 충분히 반영하지 못한다. 지형의 경사, 지반 조건, 주변 구조물과의 간섭 및 환경 요인을 종합적으로 고려하기 어렵다. 이로 인해 과도한 안전 여유를 적용하거나 예상치 못한 간섭이 발생하여 작업 효율이 저하되며 이러한 점을 적절히 고려하고 조치하지 못할 경우에는 크레인의 전도사고로 이어지는 사례도 발생한다. 셋째, 경험 의존적 의사결정이다. 최적 크레인 위치 탐색이 작업자의 경험적 판단에 의존하여 체계적 최적화가 이루어지지 않는다. 숙련 작업자의 부족과 세대 간 기술 전수의 어려움으로 작업 품질의 일관성 확보가 어렵다. 또한 복잡한 현장 조건에서는 경험만으로 최적해를 찾기 어려워 불필요한 크레인 재배치와 작업 지연을 초래한다.
디지털 트윈 기술은 물리적 대상을 디지털화하고 실시간 모니터링 데이터, 시뮬레이션을 통해 최적화가 가능하도록 하는 변동성을 갖는 모델을 제공할 수 있다(Grieves and Vickers 2017). 건설산업에서는 디지털 트윈을 통해서 최신화된 현장 정보를 제공하고 투입 자원의 활용과 예상가능한 리스크에 대응할 수 있도록 해서 개선된 의사결정을 가능하게 하고 있다 (Opoku et al. 2021). 시공과정에서 모니터링을 위한 IoT 센서들과 기계학습 알고리즘으로 실시간으로 디지털 트윈을 업데이트할 수 있다 (Madubuike et al. 2022). 이러한 과정에서는 유지관리를 위해 필요한 성능 평가와 예측 기능을 통해 유지관리 수요를 사전에 예상하고 전체 생애주기동안의 거동을 모사하는 트윈 모델로 발전할 수 있다.
UAV(unmanned aerial vehicle)를 통한 스캐닝으로 포인트 클라우드 데이터를 확보하고 이를 통해 3차원 모델을 생성하는 기술은 광범위하게 개발되고 적용되고 있다. 이러한 포인트 클라우드 데이터를 Unity와 같은 게임 엔진과 결합하여 디지털 트윈화하고 몰입환경에서 상호작용이 가능한 시뮬레이션을 제공하는 연구가 수행되었다(Tian et al. 2021). BIM 기술과 결합한 디지털 트윈 플랫폼 개발이 다수 수행된 사례가 있다. 현장에서 BIM과 디지털 트윈을 통해서 조정작업을 하고 작업을 최적화하는 연구가 수행되었고 실시간 데이터 수집과 연계하여 동적으로 모델을 업데이트하는 연구결과가 제시되었다(Tak et al. 2021). DfMA 개념을 구현하기 위해 BIM 모델과 증강현실 장비를 활용한 사전조립성 검토 기술이 개발되고 실제 현장에 시범 적용된 사례가 제시되었다(Nguyen et al. 2024). 많은 수의 부재들을 공장 제작하고 이를 현장에 운반하기 전에 조립성을 사전 검토하여 리스크를 최소화할 수 있다.
1.2 문제 정의
기존 크레인 최적화 연구는 주로 경로 계획과 충돌 회피에 집중되었으나, 실제 현장 적용에 있어 다음과 같은 한계를 갖는다. Tak et al.(2021)은 BIM 기반 4D 시뮬레이션을 통해 크레인 작업 계획을 시각화하는 방법을 제안하였다. 그러나 이 연구는 정적 위치 평가에 그쳐 동적 환경 변화와 실시간 제약 조건을 반영하지 못하여 현장 적용성이 제한적이었다. 본 연구에서는 Unity Physics 엔진 기반의 실시간 시뮬레이션을 통해 크레인의 동적 작업 과정을 재현하고, 각 위치에서의 설치 가능성을 자동으로 평가하는 Auto Search 알고리즘을 구현하였다. Gwak et al.(2021)은 유전 알고리즘을 활용한 다목적 최적화를 시도하였으나, 50개 이상의 세대 진화에 수 시간이 소요되어 동적 현장 환경에 대응하기 어려울 것으로 보인다. 본 연구에서는 Exhaustive Search 기반 알고리즘을 적용하여 현장에서 신속하게 적용 가능한 탐색 체계를 구현하였다.
Zhang and Hammad(2021)는 크레인 위치 최적화를 위한 수학적 모델을 제시하였으나, 단순화된 가정으로 인해 지형 경사, 지반 조건, 주변 구조물과의 간섭 등 실제 현장의 복잡한 제약을 충분히 반영하지 못하고 있다. 본 연구에서는 Grid Generator의 4단계 검증(지면 감지, 평탄도 검사, 구조물 이격거리, 상부 장애물 검사)을 통해 현장의 3차원 공간 제약조건을 체계적으로 반영하였다. 건설 현장의 좌표 관리는 주로 토탈스테이션이나 GPS를 활용한 절대좌표계에 의존한다(Zhang et al. 2019). Lee et al.(2016)은 UAV 기반 지형 모델링과 좌표 매핑을 제안하였으나, 추가 장비와 처리 시간이 필요하며 UTM 좌표와 같은 복잡한 숫자 체계는 현장 작업자의 직관적 이해를 어렵게 한다. 본 연구에서는 현장 구조물의 두 기준점(Start Marker, End Marker)으로 정의되는 상대좌표계를 도입하여 측량 작업 없이도 현장 기준 좌표만으로 크레인 위치를 제어할 수 있도록 하였다.
프리팹 교량 바닥판 설치를 위한 Construction Digital Twin(CDT) 프레임워크(Jang et al. 2025)와 사전조립성 검토 기술(Nguyen et al. 2024)이 이미 제안되어 실제 적용한 사례가 있다. 선행 연구에서는 Unity 기반 3D 시뮬레이션 환경을 구축하고, 크레인 작업 계획을 위한 기초적인 디지털 트윈 시스템을 개발하였다. Grid 기반 위치 탐색의 개념이 제안되고 이에 기반한 크레인 최적화 자동화의 필요성이 제시되었다. 그러나 Table 1에 정리한 바와 같이 Grid 생성 알고리즘의 구체적 구현이 부재하였고 자동 탐색 알고리즘이 없어 절대좌표계 의존으로 인한 현장 적용성 제약이 있었다.
Table 1.
Comparison of technical differences between previous study and this study
| Category | Previous study (Jang et al. 2025) | This study |
| coordinate system | Absolute coordinate system (UTM), Required to participate in the professional survey team | Relative coordinate (based on reference points in site structure), Field applicability without surveying |
|
Search crane location | Simulate individually after manual positioning | Auto Search algorithm for automatic search |
| Grid system | 5m fixed intervals, manual filtering | Adaptive Grid Generator implementation, 4-step automatic validation |
|
Optimization method | Experience-based judgement, manual review of 1~3 locations | Data-driven quantitative comparison, automated search of 9~49 locations |
| Field applicability | requires survey work and coordinate transformation process | Immediate application with site reference point setting |
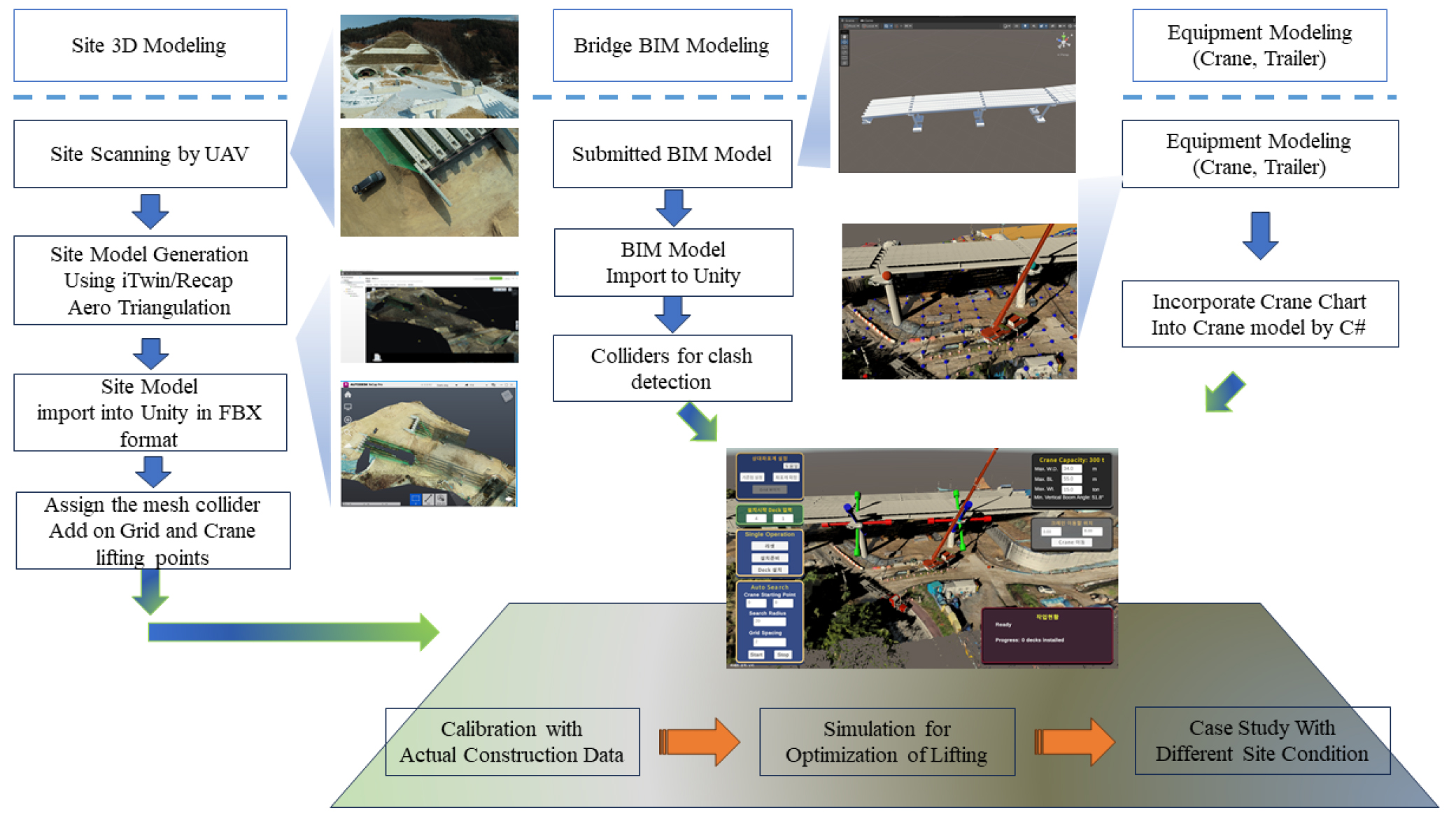
본 연구에서는 선행 CDT 프레임워크를 발전시켜 두 가지 핵심 기술을 개발하였다. 첫째, 현장 구조물의 두 기준점(Start Marker, End Marker)으로 정의되는 상대좌표계를 도입하여 측량 작업 없이도 현장 기준 좌표만으로 크레인 위치를 제어할 수 있도록 하였다. 둘째, 적응형 Grid 생성 알고리즘과 Auto Search 알고리즘을 구현하여 최적 크레인 위치를 자동으로 탐색하고 정량적으로 평가할 수 있도록 하였다. Fig. 1에 개선된 CDT 프레임워크를 도식화하였다.
2. CDT 시스템 설계
2.1 시스템 구성 설계 및 역할 정의
본 연구의 최적화 문제는 상대좌표계에서의 크레인 설치 위치 를 결정변수로 하여, 해당 위치에서 설치 가능한 바닥판 개수 를 최대화하는 것이다. 제약조건으로는 (1) 이전 크레인 위치에서 설치 완료된 바닥판 이후 연속 설치, (2) 설치 가능한 바닥판의 총 수량, (3) Crane Chart에 기반한 양중 중량과 붐 길이 조건에서의 최대 작업반경이 적용된다.
프리팹 구조의 가설을 물리엔진 기반으로(Unity 2023) 시뮬레이션 하는 업무는 시공 계획서를 수립하는 엔지니어의 역할이다. 기능 구현 뿐 아니라 엔지니어의 판단과 의사결정이 능동적으로 구현 가능해야 한다. 개발한 CDT 시스템에서는 5개의 핵심 모듈과 데이터 계층으로 설계되었다. UIManager 계층, 상대좌표계 모듈, Auto Search 엔진, 향상된 시뮬레이션 계층, 데이터 계층으로 구성된다. 각 모듈은 명확한 책임 설정이 되고 이에 따른 인터페이스가 정의된다. 시스템의 유지보수성과 확장성은 교량 부재와 현장 여건을 고려할 수 있도록 하였다.
2.2 상대좌표계 정의 및 수학적 모델
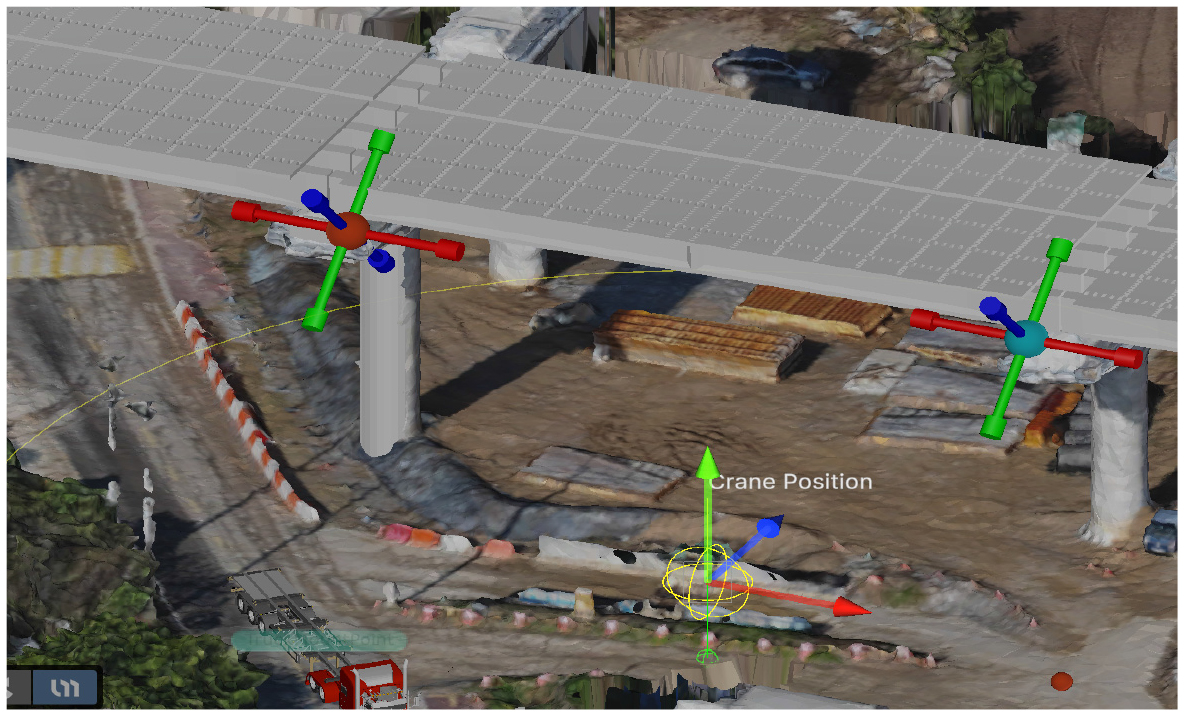
상대좌표계는 현장 작업자가 쉽게 식별할 수 있는 구조물의 두 기준점으로 정의된다. 현장 구조물의 두 점 S(Start Marker)와 E(End Marker)에 대해, 상대좌표계 R = (O, X, Y, Z)는 원점: O = S, X축: X = normalize(E – S), Z축: Z = normalize(cross(up, X) × sgn(crane_direction)), Y축: Y = cross(Z, X)로 설정된다. Fig. 2에 나타낸 것처럼 핸들러를 통해 엔지니어가 직접 상대좌표 기준위치를 조정할 수 있다. 시스템 내부의 연산은 절대좌표에 의해 수행되나 사용자의 편의성 제고를 위해 UI상에서는 상대좌표계가 적용된다. 즉, 현장의 Grid 설정 및 크레인의 위치설정시에는 상대좌표에 의해 위치가 결정된다. 따라서 상대좌표와 절대좌표간의 좌표변환이 이루어져야 한다. 절대좌표 와 상대좌표 간의 변환이 시스템에서 수행된다.
상대좌표계는 기준점이 안정적으로 정의되는 경우에 가장 효과적으로 작동하므로, 기준점 설정이 어려운 현장이나 공정 진행에 따라 기준점의 위치가 변화할 가능성이 있는 경우에는 적용에 일부 제약이 있을 수 있다. 특히 상대좌표계의 설정시 명확한 위치를 설정하지 못 할 경우 오차 누적 가능성이나 기준점 불확실성에 따른 시공상의 오류 발생 가능성도 배제할 수 없다. 시공시뮬레이션이 시행되는 시점에 따라 조건이 달라질 수 있겠으나 실질적인 시공시뮬레이션이 시행되는 시점은 교대나 교각 등 하부공이 완성되고 PC Deck의 제작이 이루어지는 때이므로, 상대좌표계 설정을 위한 Start Marker와 End Marker는 교각이나 교대의 코너부에 설정하는 것이 가장 무난할 것으로 판단된다.
2.3 Auto Search 알고리즘
CDT에 대한 선행 연구에서 개념적으로 제시한 Grid 탐색을 구체화하였다. 상대좌표계를 적용한 적응형 Grid 생성하고 상대좌표에 의거한 크레인 위치이동 모듈을 생성하였다. 최적의 크레인 위치 파악을 위한 Auto Search 모듈을 시스템 내에서 구현하였다. 적응형 Grid 생성은 상대좌표를 적용하여 현장내 Grid를 생성한다. Grid는 설정된 원점(CenterPoint p₀)과 방향을 적용하여 생성하며 생성되는 Grid의 Grid 생성범위(SearchRadius r)와 간격(BaseSpacing Δg)을 입력값으로 설정 한다.
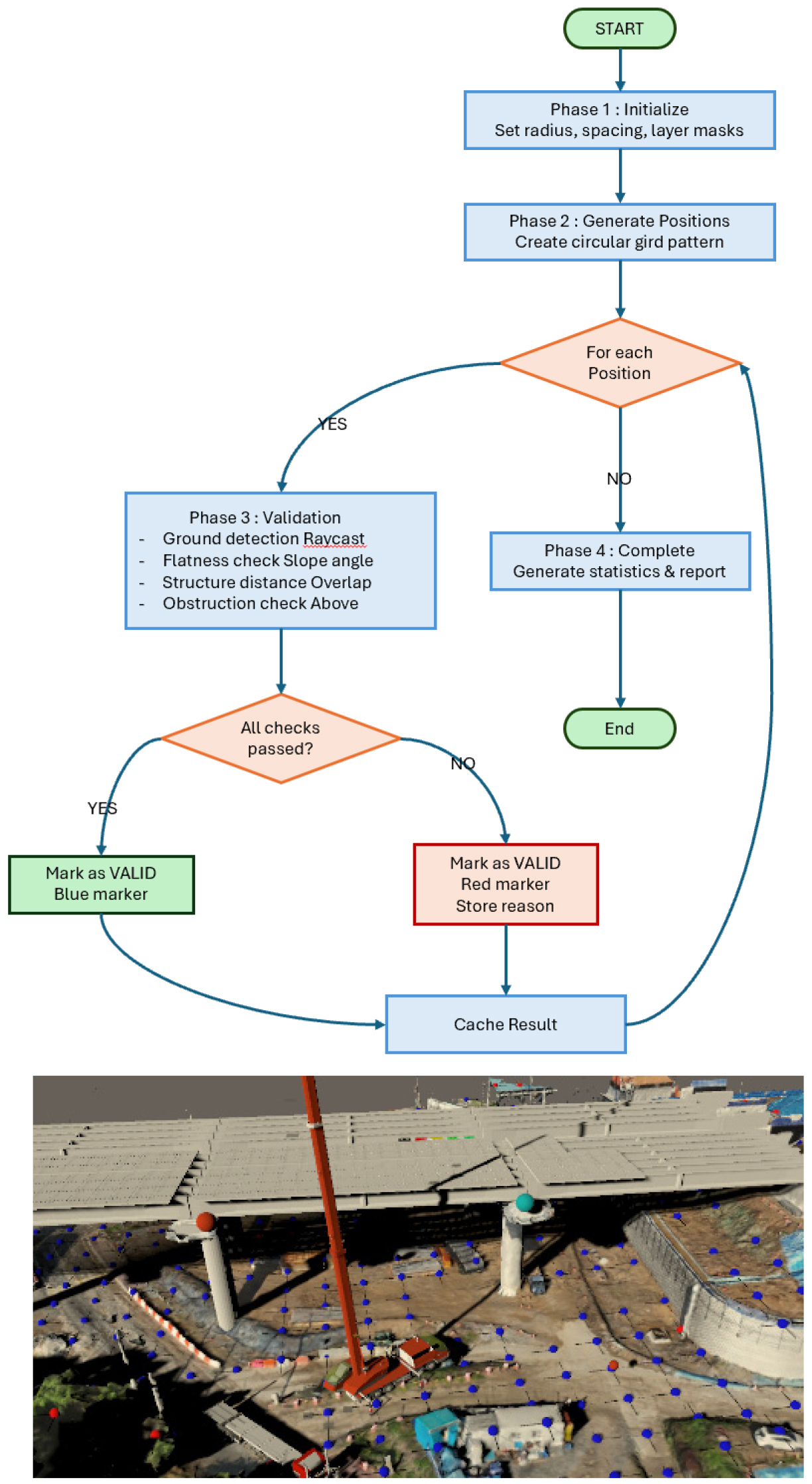
GridGenerator는 크레인 설치 가능 위치를 자동으로 탐색하기 위한 적응형 그리드 생성 모듈로, 지형 특성과 구조물 배치를 고려한 유효 위치 판별 시스템이다. Fig. 3에 나타낸 이 알고리즘은 4단계로 구성된다: (1) 초기화 단계에서 탐색 반경(Radius), 그리드 간격(Gap), 레이어 마스크를 설정하고 캐싱 시스템을 초기화하며, (2) 위치 생성 단계에서 크레인 중심으로부터 원형 패턴의 그리드 포인트를 생성하고, (3) 검증 단계에서 각 포인트에 대해 ① 지면 감지(Raycast), ② 평탄도 검사(경사각 ≤30°, 4방향 높이차 검증), ③ 구조물 이격 거리(OverlapSphere + Bounds, 최소 3 m), ④ 상부 장애물 검사(Y+2 m에서 OverlapSphere)의 4가지 조건을 순차적으로 평가하여 모든 조건을 통과한 위치만 유효(파란색 마커)로 판정하며, (4) 완료 단계에서 검증 결과를 캐싱하고 통계를 생성한다. 성능 최적화를 위해 NonAlloc 계열 Physics 메서드를 사용하여 메모리 재사용 기법을 적용하여 메모리 할당을 최소화하고, Dictionary 기반 캐싱으로 중복 계산을 방지하며, 배치 처리(Batch Size: 100)를 통해 프레임 분산 처리를 구현하였다.
상대좌표를 기반으로 하는 크레인 위치 제어 알고리즘은 다음과 같다. CraneController는 상대좌표계 기반의 크레인 위치 제어 모듈로, 현장 구조물을 기준으로 한 직관적인 위치 지정을 가능하게 한다. 이 알고리즘은 Fig. 4(a)와 같이 3단계로 구성된다: (1) 좌표 변환 단계에서 UIManager의 변환 행렬을 통해 상대좌표 (X, Z)를 월드좌표 (X, Z)로 변환하고, (2) 지면 감지 단계에서 Unity Physics의 Raycast를 Site 레이어에 대해 수직 하향 투사하여 지표면 높이를 탐지한 후 크레인 안전 높이 2.0 m를 가산하여 최종 Y좌표를 결정하며, (3) 실행 단계에서 Lerp 보간법을 이용한 부드러운 이동과 함께 역변환을 통한 오차 검증(허용 오차 ±0.1 m)을 수행한다. 이를 통해 측량 작업 없이도 현장 기준 좌표만으로 정확한 크레인 위치 제어가 가능하며, 모든 이동 기록은 자동으로 로그 파일에 저장되어 작업 이력 추적이 가능하다.
자동 탐색 알고리즘을 구현하기 위해 AutoSearchManager를 활용하였다. AutoSearchManager는 프리팹 바닥판 설치를 위한 최적 크레인 위치를 자동으로 탐색하는 모듈로, 상대좌표계와 Grid Generator를 통합하여 전역 최적화를 수행한다. Fig. 4(b)에 나타낸 알고리즘은 4단계로 구성된다:
(1) 초기화 단계에서 탐색 중심점, 반경, 간격을 설정하고 이전 결과를 초기화하며,
(2) 좌표계 모드 선택 단계에서 Crane Relative 모드 시 CraneRelativeCoordinateSystem을 통한 나선형 패턴을, Standard 모드 시 GenerateSpiralSearchOrder를 통한 그리드 패턴을 생성하고,
(3) 반복 탐색 단계에서 각 위치로 크레인을 이동시킨 후 Single Operation 시뮬레이션을 실행하여 설치 가능 개수, 중단 이유, 소요 시간을 기록하며,
(4) 최적화 단계에서 설치 가능 개수를 목적함수로 하여 MAX(Installed Count) 기준으로 최적 위치를 도출하고 Top 10 위치와 Heatmap을 포함한 보고서를 생성한다. 이 알고리즘은 O(n)의 시간 복잡도로 n개의 탐색 위치를 순차적으로 평가하며, 모든 결과는 ConcurrentBag에 스레드 안전하게 저장되어 실시간 현장 적용 시 크레인 재배치를 감소시키고 전체 작업 시간을 단축시키는 효과를 나타낼 수 있다.
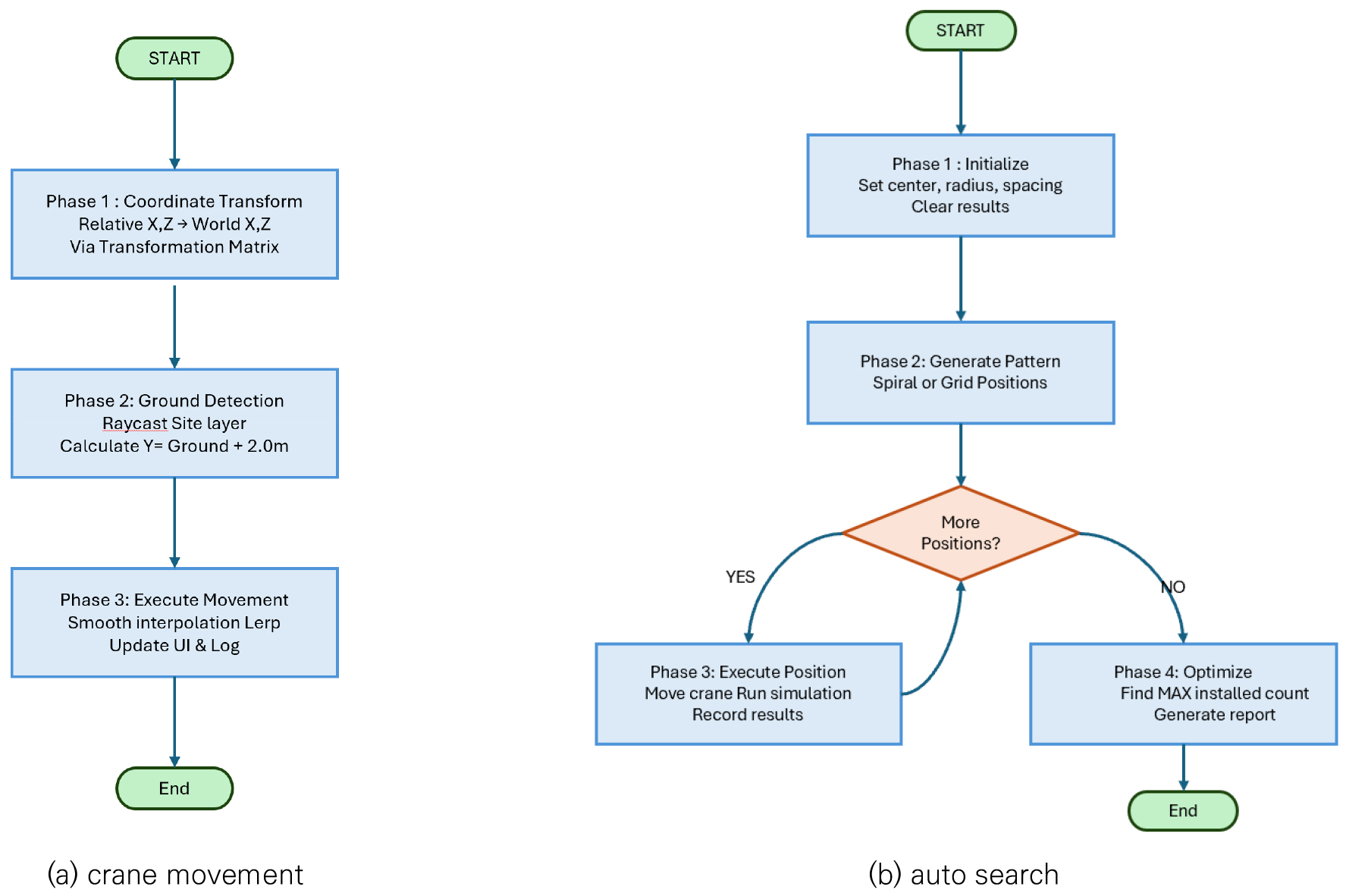
Fig. 5는 CDT 시뮬레이터의 작동을 위한 UI(User Interface)를 보여준다. 좌측 상단의 ‘상대좌표계 설정’ 판넬은 ‘기준점 설정 버튼을 눌러서 StartMarkewr와 EndMarkewr를 마우스로 위치이동하여 설정하며, 설정완료 후 ’좌표계 확정‘ 버튼을 눌러 세팅된 상대좌표계를 확정하는 메뉴이다. 이로써 실제 측량좌표에 의한 크레인의 위치가 아니라 사용자가 설정한 기준에 따른 상대좌표계를 설정함으로써 손쉽게 크레인 위치를 이동시킬 수 있게 된다.
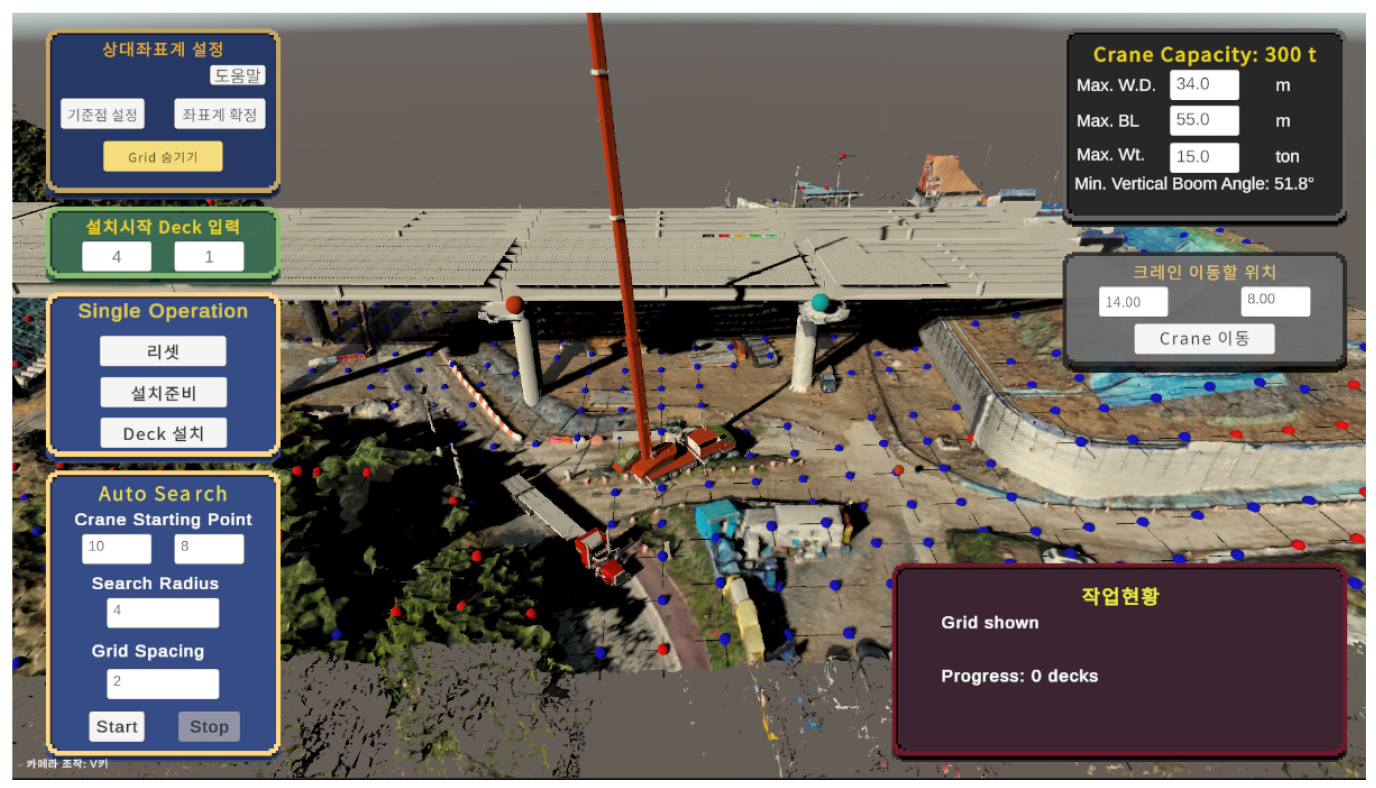
좌측 두번째 메뉴판넬은 설치가 시작되는 Deck를 입력하는 메뉴이다. 첫 번째 입력셀은 경간 번호를 의미하며 두 번째 입력셀은 해당경간의 Deck 번호를 의미한다. 따라서 직전 크레인 위치에서 설치를 완료한 다음 Deck의 위치를 지정하여 Deck 설치 시뮬레이션이 연속적으로 이루어 질 수 있도록 한다.
세 번째 메뉴인 Single Operation은 주어진 현장조건에 대해 엔지니어가 추정하는 크레인의 위치에서 시뮬레이션을 수행하는 버튼이다. ‘설치준비’ 버튼을 통해 Deck를 트레일러에 야적하게 되며, ‘Deck 설치’ 버튼을 누르면 크레인에 의한 Deck 설치 동작이 수행된다. 크레인의 Max. Working Radius'내의 Deck 설치가 완료되거나 크레인이 지장물과 충돌하게 되면 Deck 설치작업이 완료되며 이때 설치한 총 Deck 수량이 우측 하단 작업현황 판넬에 나타나게 된다.
좌측하단 마지막 판넬은 크레인의 최초 위치와 설치범위, 그리고 크레인 이동간격 지정에 따라 크레인이 자동으로 위치를 이동하면서 시뮬레이션을 수행하게 된다. 이때 시뮬레이션 결과는 Output 파일로 출력되게 된다.
크레인의 위치 최적화를 위해 우선 인양할 물체의 위치(트레일러의 Pivot Center), 설치할 위치가 크레인의 Pivot Center를 중심으로 하고 크레인의 작업반경을 가지는 원 내부에 위치하여야 한다는 것을 확인하는 것이 Single Operation에 의해 확인되었으면, 크레인의 최적 위치를 확인하기 위해 Single Operation에서의 크레인의 위치를 중심으로 크레인의 위치를 옮겨 가면서 설치 가능한 Deck의 수량을 측정함으로써 어느 위치가 최적의 크레인 위치인지를 확인할 수 있다. 본 논문에서는 크레인의 최적 위치 확인을 위해 Auto Search 모듈을 구현하였다.
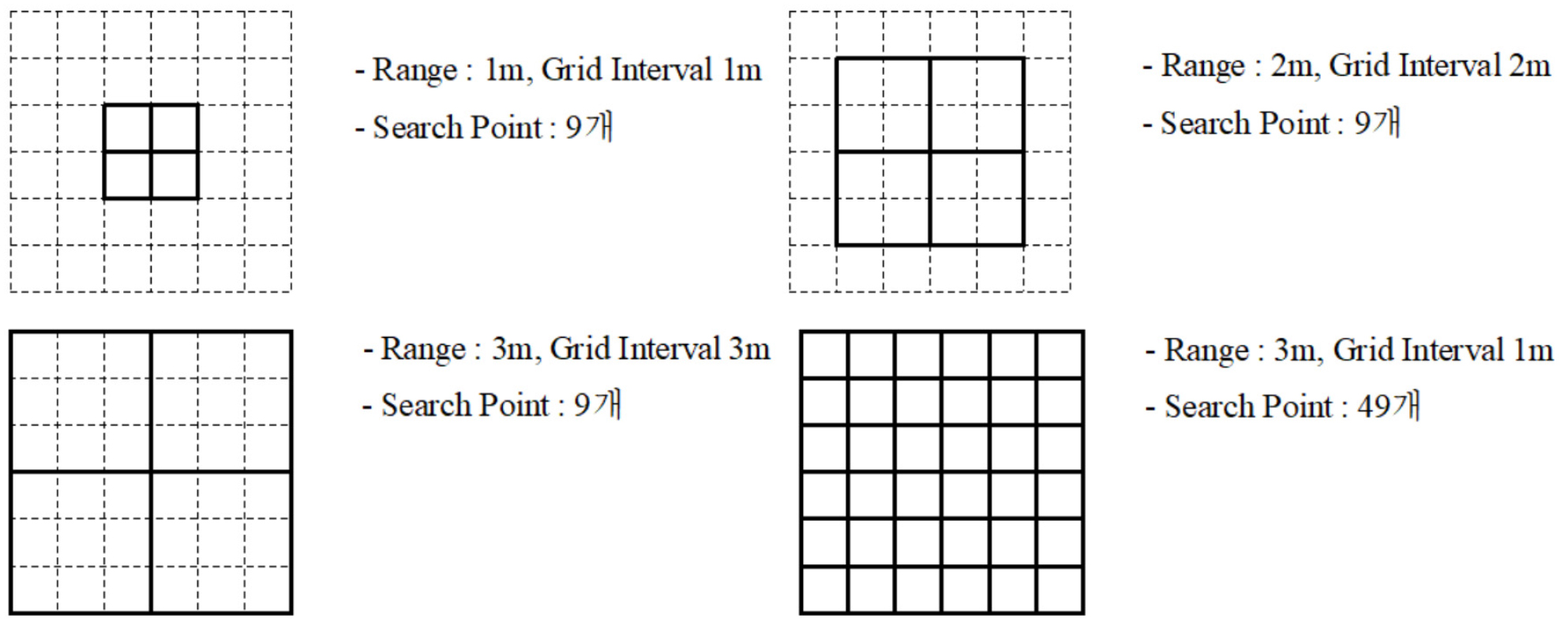
Crane Start Point는 Single Operation에서 확인된 크레인의 상대좌표이며 Search Radius는 크레인의 이동범위를 나타내고, Grid Spacing은 한 번에 이동할 크레인의 이동량을 의미한다. 따라서 각각을 그림으로 표현하면 Fig. 6과 같다.
각각의 크레인 위치에서 Deck 설치수량을 정리한 것이 Table 2이다.
최초 크레인의 위치는 경험있는 엔지니어가 2D 도면과 크레인 차트를 활용하여 추정한 최적의 크레인 위치이다. 그런데 기존의 크레인 위치 확정 방법에서는 추가적인 분석을 통해 최적 크레인 위치에 대한 정량적 추적이 사실상 이루어지기 어렵다. 본 연구에서는 엔지니어가 추정한 크레인 위치를 기반으로 크레인 위치의 변경을 통해 최적의 위치를 찾아 낼 수 있는 정량적 데이터로서 상대좌표계 설정방법을 제시하고 이것을 Auto Search Simulation을 통해 도출한 것이다.
3. 고속도로 교량 바닥판 가설 사례 연구
3.1 테스트 현장 및 실험설계
개발된 CDT 시스템 검증을 위해 건설 중인 교량 현장에 적용하였다. 교량의 형식은 PSC 거더교이고 경간구성은 5@35 m = 175 m, 교폭은 12.5 m, 16.1 m로 구성되어 있다. 가설 대상인 프리팹 바닥판의 규격은 12.5 m × 1.97 m × 0.24 m(최대)이고 최대 중량은 13.87톤으로 산정되었다. 교량을 건설하는데 소요되는 프리팹 바닥판은 총 255개이다. 개발된 시스템의 적용성 및 효과를 정량화하기 위해 3가지 방법으로 가설 계획을 수립하였다. 첫 번째는 기존 방법인 2D 도면 기반의 수동 계획, 두 번째는 BIM 기반으로 Revit 모델링과 Navisworks 시뮬레이션, 마지막으로 이 논문의 방법론인 상대좌표계와 Auto Search를 활용한 것이다.
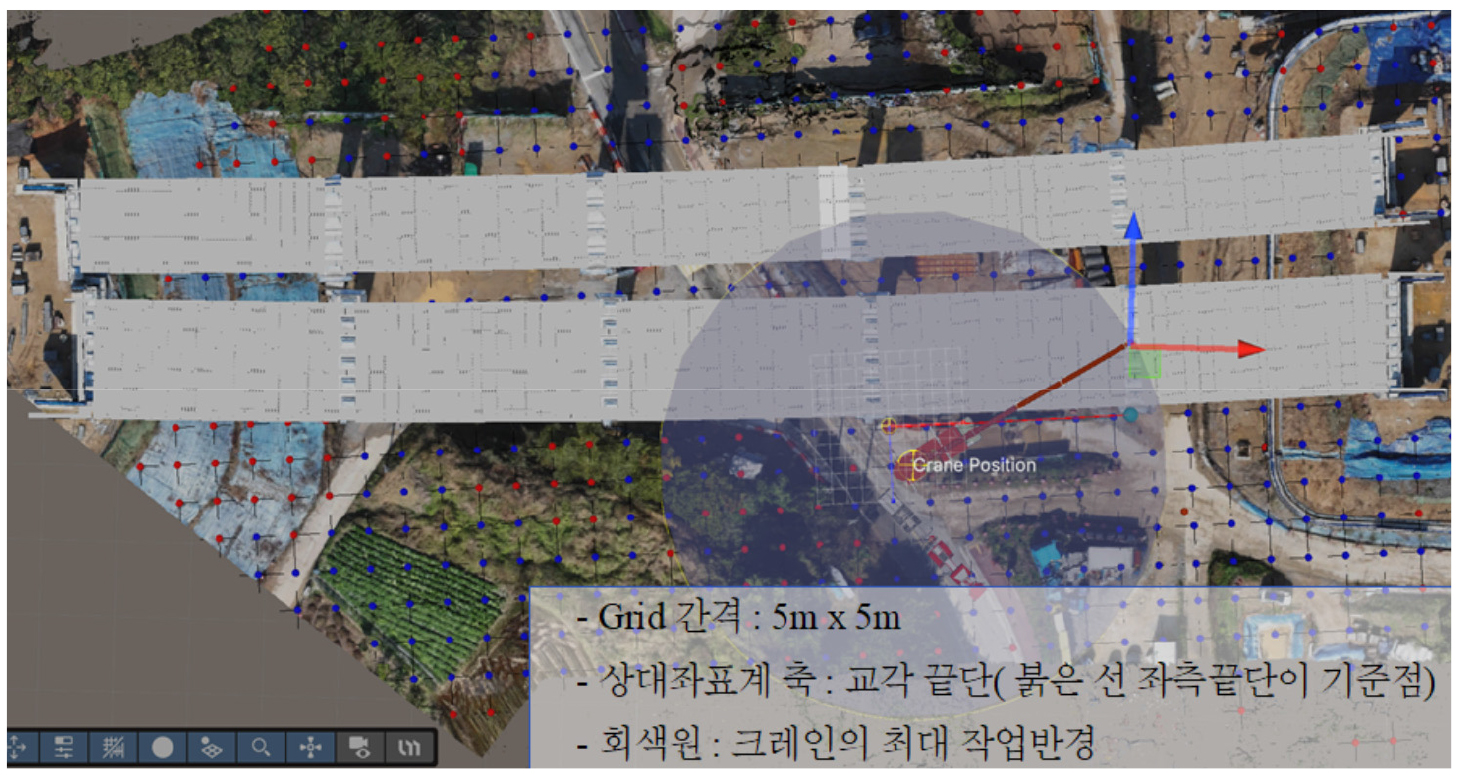
Fig. 7은 교각의 외측 연단을 기준으로 설정한 상대좌표계와 이에 의해 생성된 Grid를 보여준다. 크레인의 위치선정 및 이동 시뮬레이션은 이 Grid에 의해 정량적으로 파악되고 분석될 수 있다. Auto Search 기능은 상대좌표계와 Grid를 기반으로 크레인의 위치를 변경하면서 시뮬레이션을 수행함으로써 크레인의 안전성과 최적위치에 대한 정량적 파악과 분석을 가능케 한다. 즉, 크레인 붐의 길이와 크레인의 초기 설치 위치는 현장의 시공조건과 3차원적인 공간의 제약성을 감안하여 사전에 결정되며, 크레인의 설치위치 설정과 조정에 대한 정량적 분석과 판단의 근거가 제시될 수 있다.
3.2 실험 결과
개발된 CDT 시스템을 이용하여 Grid 간격에 따른 성능을 시뮬레이션 하여 Table 2의 결과를 얻었다.. 최대 설치수량을 가능하게 하는 최적의 위치는 (3,8) 였다. 그러나 데이터 분석 결과 모든 Gap에서 최대값은 탐색범위의 경계에서 발생하였다. 이것은 실제 크레인의 최적 위치는 현재 조사한 범위 밖에 존재할 가능성을 보여 준다. Deck 설치수량의 증가패턴을 분석해 보면 x축 방향으로 설치수량이 증가하고 있으며 z축이 감소하는 방향으로 설치수량이 증가함을 보여주고 있다. 따라서 최초로 설정한 (0,8)은 최적 중심이 아니라는 결론이 도출되며 (3,8)를 중심으로 크레인의 최적 위치를 재탐색할 필요성이 제기된다.
그러므로 2차 시뮬레이션에서는 (3,8)를 중심으로 하되, Spacing을 3 m로 하여 광역 탐색을 시행한 후 최대값을 보이는 좌표를 중심으로 spacing을 2 m, 1 m로 좁혀가면서 최적의 크레인 위치를 찾아야 한다. 이 작업은 3차 시뮬레이션을 수행한 뒤에도 최적의 크레인 위치를 결정하였다고 판단하기에는 미흡하므로 (9,5)를 중심으로 spacing을 좁혀가며 더욱 정밀하게 크레인의 최적 좌 표를 결정할 수 있다. Fig. 8은 Table 2에서 나타난 Data를 시각화 하여 추후 시뮬레이션 시행의 방향을 파악할 수 있게 한다.
Table 2.
Search performance by grid interval
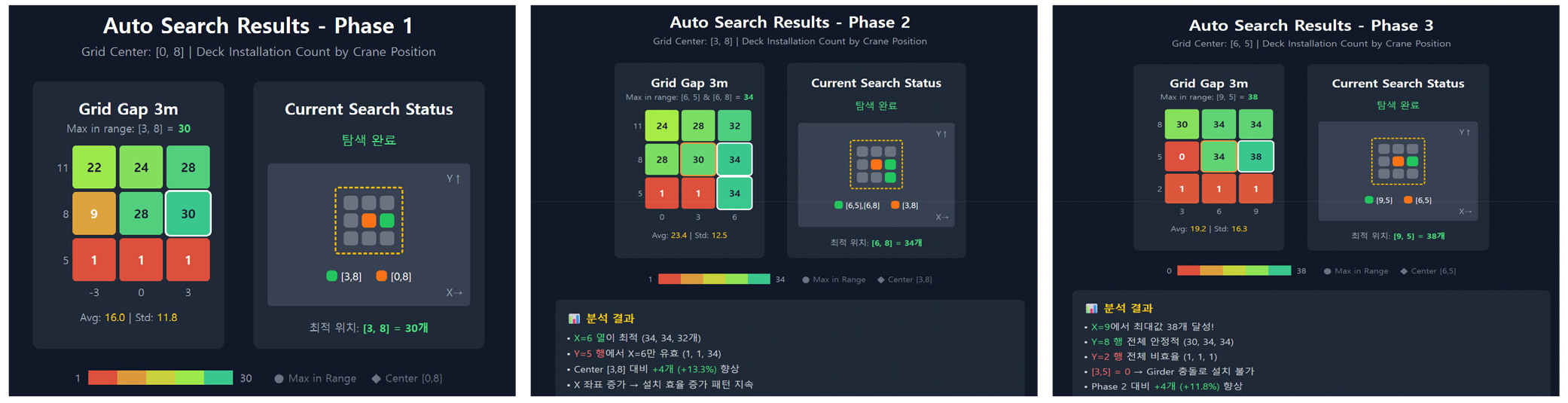
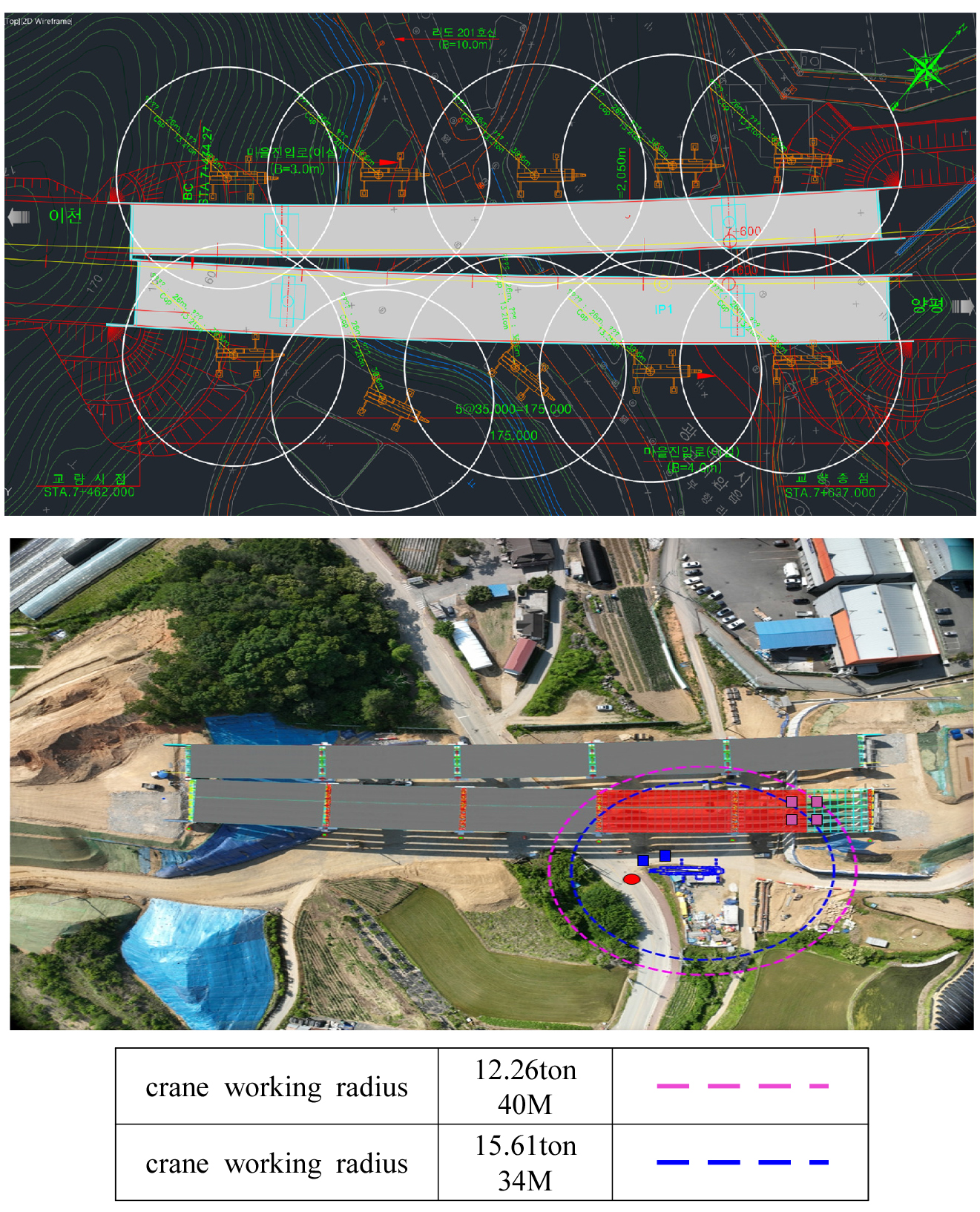
Fig. 9는 현재 시공계획서 실무에서 사용하는 방법에 의한 크레인 배치 작업계획을 보여준다. 크레인의 시공계획은 Boom의 길이와 양중 중량에 따라 Crane Chart에 의해 크레인의 작업반경이 결정되는데 본 시공계획에서 나타나는 것은 교량상판의 중량에 따른 작업반경의 크기만을 체크했을 뿐, 현장 시공여건을 고려한 실질적인 크레인 시공계획이 사전에 수립될 수 있는 기술적인 근거가 매우 빈약하다. 그러므로 현재의 크레인 시공계획에서는 현장의 시공조건을 반영한 시공 시뮬레이션은 원천적으로 한계를 지닐 수밖에 없는 것이다.
3.3 기존 방법론과의 비교 분석
기존의 크레인 작업 계획 방법(Conventional Method)과 제안된 CDT 시스템의 근본적 차이는 3차원 공간에서의 시공재현성 개선과 데이터 기반의 합리적 의사결정 두 가지 측면에서 설명될 수 있다.
통상 크레인을 활용한 양중작업은 중량물을 단 1회 작업으로 인양하여 지정된 위치에 설치하는 방식으로 이루어 진다. 이때 크레인의 최적위치는 Working Radius를 최소로 하는 위치로 결정되게 되는데 이러한 의사결정은 크레인 설치위치의 지장물 현황이나 지형지물의 제약을 받게 되므로 사전에 크레인의 위치에 대한 검토나 시뮬레이션을 통해 양중작업의 안전성을 검토하게 된다.그런데 PC 교량상판 설치의 경우에는 다수의 교량상판을 연속적으로 설치하게 되는 작업의 특성상 크레인의 위치에 따라 설치할 수 있는 Deck의 수량이 달라지게 되므로 크레인의 위치 선정 문제는 단순히 크레인 작업의 안전성 문제 뿐만 아니라 크레인의 투입시간과 연계되어 작업의 생산성, 더 나아가 공사비와도 직결되는 문제가 된다.
크레인의 위치 선정의 문제는 시공 시뮬레이션이 필수적으로 요구되나 그동안 적절한 도구가 없이 2D 도면상에 크레인 위치와 Working Radius를 작도하는 평면적 접근에 그쳤던 것이 현실이었던 바, 최적화에 접근하기 보다는 보수적인 접근으로 작업 안전성을 확보하려는 것이 일반적인 경향이었다. 본 연구에서는 현장의 지형조건을 3차원으로 시뮬레이션하고 교량 구조물 역시 BIM 모델을 적용하여 3차원으로 구현함으로써 크레인의 위치와 Boom의 길이, 구조물과의 충돌여부를 실제 현장조건과 근접하게 검토할 수 있게 되었다. 또한 크레인의 위치를 현장내 기준점 설정을 통해 설정하고 체계적으로 시뮬레이션을 시행함으로써 실무적 실용성을 크게 높일 수 있게 되었다.
Table 3은 각각의 방법 적용에 따른 정량적 비교를 나타낸다.
첫째, 3차원 공간에서의 시공 재현성 측면이 개선되었다. 크레인의 양중능력 적절성은 Boom 길이, 작업반경, 양중하중의 상호관계 속에서 파악되어야 하며, 이는 3차원 공간에서의 정확한 시공재현을 통해서만 엄밀하게 검증될 수 있다. 기존 방법론은 Table 2에 제시된 바와 같이 2D 도면과 크레인 제원표(Load Chart)를 기반으로 평면적 접근을 수행한다. 이 방식은 Boom 길이 48.7 m, 작업반경 28 m/34 m/40 m 조건에서 Max Lifting Capacity를 각각 81.8 %, 84.0 %, 83.0 %로 산정하였으나, 실제 현장의 지형 경사, 지반 조건, 주변 구조물과의 간섭, 크레인 설치 위치의 평탄도 등 3차원 공간 제약조건을 충분히 반영하지 못한다.
반면 제안된 CDT 시스템은 Unity Physics 엔진 기반으로 실제 현장을 3차원으로 재현하고, GridGenerator의 4단계 검증(지면 감지, 평탄도 검사, 구조물 이격거리, 상부 장애물)을 통해 크레인 설치를 위한 엄밀한 시공조건과 제약사항을 반영한다. Fig. 5에 제시된 최적 위치 (3, 5)에서 시뮬레이션 결과 Max Lifting Capacity 75 %로 나타났으며, 이는 기존 방법 대비 9% 포인트 낮지만 실제 현장 조건을 정확히 반영한 결과이다. 특히 Boom의 수직/수평 회전각, Hook의 3차원 궤적, 바닥판과 거더 간 충돌 검사가 실시간으로 계산되어 실질적인 크레인 작업 가능성을 사전 검증할 수 있다. 이러한 3차원 시공재현성은 현장 적용 시 예상치 못한 간섭이나 안전사고를 사전에 방지하는 신뢰할 만한 기술적 근거를 제공한다.
둘째, CDT 시스템의 방법론은 데이터 기반의 합리적인 의사결정을 가능케 한다. 기존 방식은 경험적 판단에 기반하여 1-2회 작업반경 검토만으로 크레인 설치 위치를 결정하므로, 최적화 요구를 충족시키기에 미흡할 뿐 아니라 충분한 안전성 확보에 대한 신뢰를 얻기 어렵다. Fig. 9에 제시된 기존 방법의 크레인 배치는 작업반경 28 m, 34 m, 40 m의 3개 위치에서만 검토되었으며, 이들 위치가 실제 최적인지 검증할 수 있는 체계적 방법이 부재하다.
제안된 CDT 시스템은 Auto Search 알고리즘을 통해 체계적이고 반복적인 시뮬레이션을 수행하며 이를 통해 데이터에 기반한 최적화 가능성을 확보할 수 있다. Table 2에 제시된 바와 같이 Grid 간격 3 m, 탐색 반경 3 m 조건에서 9개 위치를 자동 탐색하고 각 위치에서 Single Operation 시뮬레이션을 실행하여 설치 가능 개수를 정량적으로 비교하였다. 이 과정에서 최대 설치수량 34개를 달성하는 최적 위치 (3, 5)를 도출하였으며, 이는 기존 방법(32개) 대비 9.4% 향상된 결과이다.
Table 3.
Installation plan by the conventional method
4. 결 론
이 논문에서는 선행된 CDT 프레임워크를 기반으로 상대좌표계와 Auto Search 알고리즘을 통합한 크레인 작업 최적화 시스템을 제시하고 그 결과를 실제 고속도로 교량 건설 현장에 적용하여 유효성을 검증하였다. 개발된 방법론과 적용 사례에서 다음과 같은 결론을 도출하였다.
1) 프리팹 교량 바닥판 가설을 위한 크레인 작업 최적화 시스템을 개발하고 실제 현장에 적용하여 그 유효성을 검증하였다. 현재 건설 현장의 크레인 시공계획은 숙련 작업자의 경험적 판단에 의존하며, 정량적이고 데이터에 기반한 분석이 부족하여 체계적인 최적화와 안전성 검증에 한계가 있었다. 이러한 문제를 해결하기 위한 방법론을 제시하고 실제 현장에 적용하여 검증하였다.
2) 이 논문에서는 상대좌표계 도입을 통한 정량적 분석 기준을 확보하였다. 현장 구조물의 두 기준점으로 정의되는 상대좌표계를 도입하여, 크레인 위치와 이동을 수학적으로 정의하고 최적화를 위한 일관된 기준 프레임워크를 정립하였다. 기존의 경험 의존적 접근에서는 크레인 위치 간 우열을 판단할 객관적 기준이 부재하여 “최적 위치”의 개념 자체가 모호하였으나, 상대좌표계의 도입으로 위치의 정량적 비교가 가능해졌다. 특히 절대좌표와 상대좌표 간 변환 행렬을 통해 시스템 내부에서는 전체좌표로 엄밀한 계산을 수행하면서도, 사용자 인터페이스에서는 “4경간 1번 거더 기준 (3, 5) 위치”와 같은 현장 친화적 표현이 가능하여 기술적 정확성과 실무적 편의성을 동시에 확보하였다.
3) 적응형 Grid 생성과 반복 시뮬레이션을 통한 데이터 기반 의사결정 체계를 구축하였다. 상대좌표계를 기반으로 적응형 Grid 생성 알고리즘과 Auto Search 알고리즘을 개발하여, 현장의 복잡한 시공조건을 정량적으로 분석하고 데이터에 기반한 의사결정을 수행할 수 있는 체계를 구축하였다. 실제 현장 적용에서 Grid 간격 3 m 조건으로 9개 위치를 자동 탐색한 결과, 최적 위치 (3, 5)에서 최대 설치수량 35개를 달성하였으며, 이는 기존 경험 기반 방법(32개) 대비 9.4 % 향상된 결과이다. Grid 간격을 조정하면서 시뮬레이션에 의해 나타난 결과를 평가하여 복수의 준최적해를 확인함으로써, 엔지니어가 현장 여건에 따라 데이터에 근거한 대안을 선택할 수 있는 유연성을 제공한다. 이러한 정량적이고 계수적인 시뮬레이션 접근은 크레인 작업의 안전성을 사전에 검증하고 최적화를 체계적으로 모색할 수 있는 기반을 구축하였다는 점에서 의의가 있다.
4) Unity 기반 3차원 시공재현을 통한 실질적 안전성 검토 및 최적화를 구현하였다. 게임 엔진을 활용한 3D 실시간 시뮬레이션 환경을 구축하여, 기존 2D 도면 기반 방법론이 간과할 수 있는 3차원 공간의 복잡한 제약조건을 엄밀하게 반영하고 실질적인 안전성을 검토할 수 있는 CDT 시스템을 실용화하였다. 실제 PSC 거더교 적용 결과, 기존 방법이 Max Lifting Capacity 84 %로 산정한 것과 달리, 제안 시스템은 현장의 지형 경사, 구조물 배치, 평탄도 등을 반영하여 75 %로 평가함으로써 9 % 포인트의 실질적 안전 여유도를 확보하였다.
